10 ethercat state machine, Ethercat state machine, Figure 35: ethercat state machine – BECKHOFF EtherCAT Technology Section I User Manual
Page 90
EtherCAT State Machine
I-70
Slave Controller
– Technology
10 EtherCAT State Machine
The EtherCAT State machine (ESM) is responsible for the coordination of master and slave
applications at start up and during operation. State changes are typically initiated by requests of the
master. They are acknowledged by the local application after the associated operations have been
executed. Unsolicited state changes of the local application are also possible.
Simple devices without a µController can be configured to use EtherCAT State Machine emulation.
These devices simply accept and acknowledge any state change automatically.
There are four states an EtherCAT slave shall support, plus one optional state:
Init (state after Reset)
Pre-Operational
Safe-Operational
Operational
Bootstrap (optional)
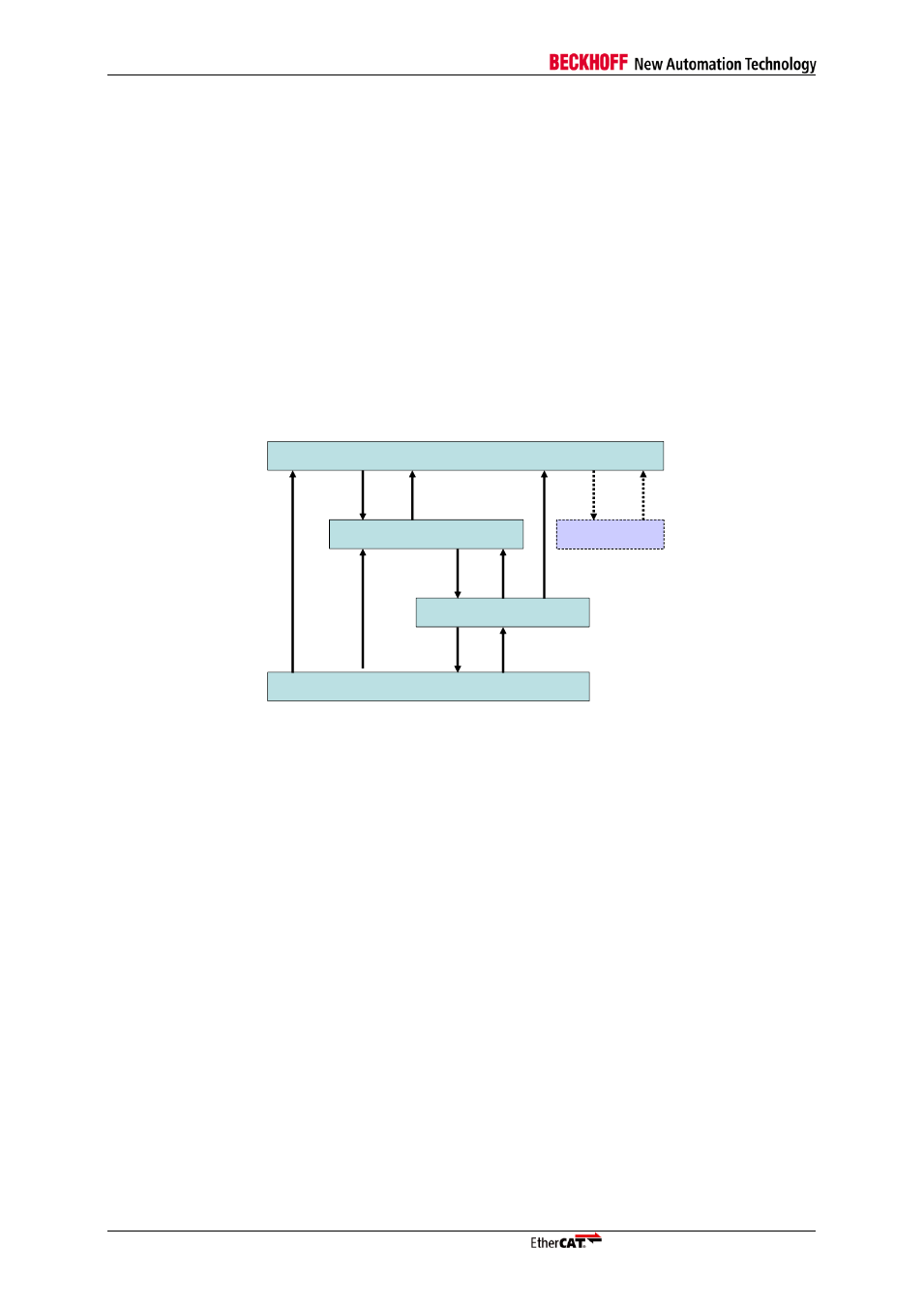
The states and the allowed state changes are shown in Figure 35:
Init
(IP)
Pre-Operational
Operational
Safe-Operational
(OP)
(PI)
(PS)
(SP)
(OS)
(SO)
(SI)
(OI)
Bootstrap
(optional)
(IB)
(BI)
Figure 35: EtherCAT State Machine
NOTE: Not all state changes are possible, e.g., the transition from ‘Init’ to ‘Operational’ requires the following
sequence: Init
→ Pre-Operational → Save-Operational → Operational.
Each state defines required services. Before a state change is confirmed by the slave all services
required for the requested state have to be provided or stopped respectively.