4 communication timing, Communication timing – BECKHOFF EtherCAT Technology Section I User Manual
Page 88
Distributed Clocks
I-68
Slave Controller
– Technology
9.4
Communication Timing
Three communication modes are possible:
1. Free Run
EtherCAT Communication and application are running independently from each other.
2. Synchronized to Output Event
The slave application is synchronized to an Output event. If no Outputs are used the Input event is
used for synchronization.
3. Synchronized to SyncSignal
Application is synchronized to the SyncSignal.
For further information please refer to the corresponding section within the EtherCAT Information
System.
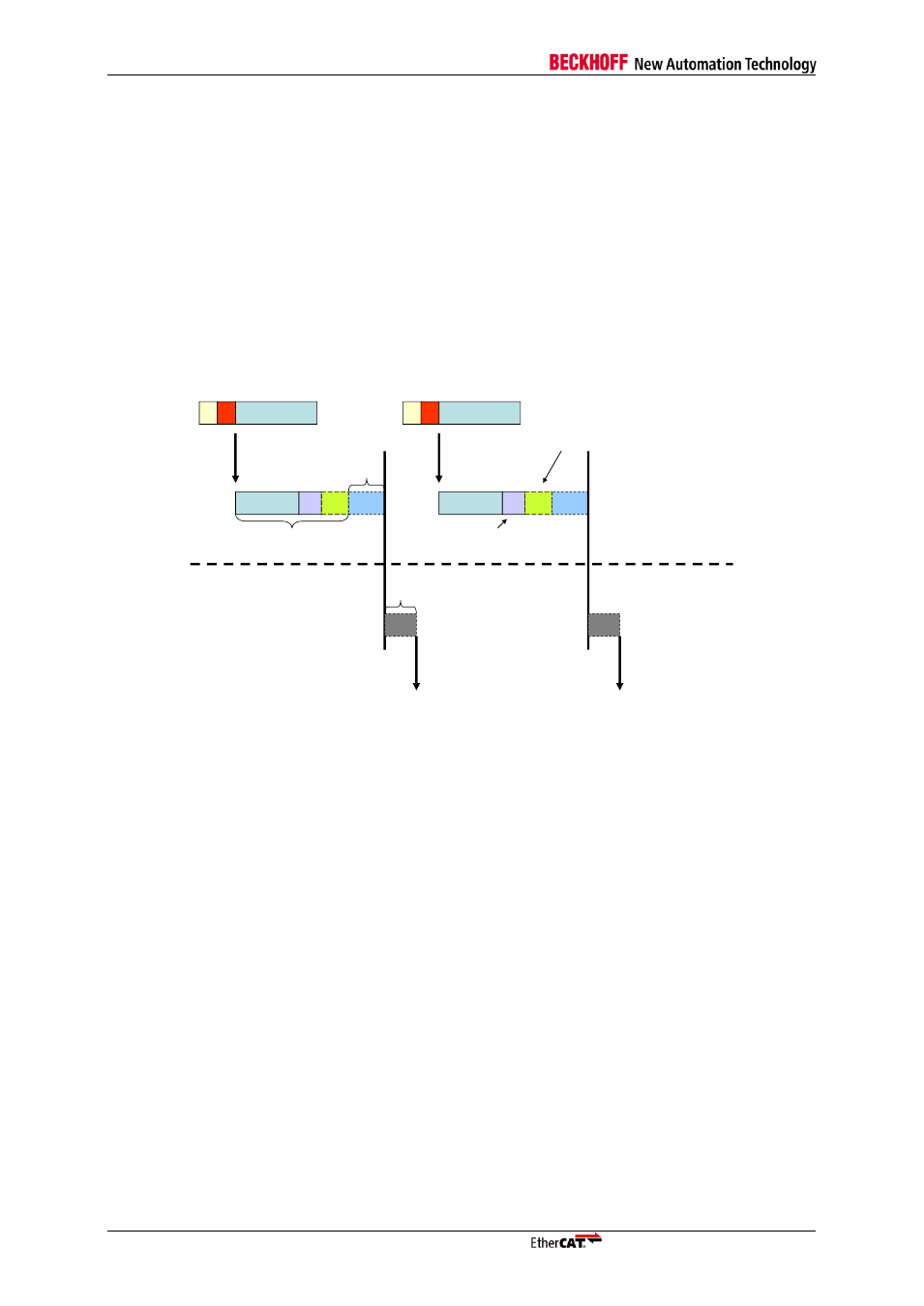
The Communication Timing with use of Distributed Clocks is explained in Figure 34.
I O
Calc
NC Task
Frame
D 10% U
I O
Calc
Frame
D 10% U
U
Sync0
U
Sync0
Master
Slave
User Shift (Master)
Fixed Shift (precalc.)
Example:
10% of Cycle Time
reserved for Jitter
Frame Delay
User Shift (Slave)
DC Base
Figure 34: DC Timing Signals in relation to Communication
IO(Master)
Time to load IO Data to communication buffer and vice versa.
Calc(Master)
Processing time of the master.
Frame(Communication)
Time to transmit the IO-Data-Frame (about 5µs overhead plus 80ns per Byte of Data).
D(Communication)
Delay time of the EtherCAT-Slaves to transfer data (approx. 1 µs with 100BASE-TX, plus line delay of
approx. 5ns per m).
Jitter(Communication)
Depends mostly on Master timing quality.
U(Communication-Master)
Shift time that is adjusted internally by the master to deal with delays needed by the master and adjust
the cycle time.
U(Slave)
Delay time of the EtherCAT-Slaves. This can be set by each slave individually and is usually 0. There
is a need to set this parameter in case of timing inaccuracies of the slave or to deal with slaves that
have a slow output method compared to others with high speed output.