2 propagation delay measurement, 1 propagation delay measurement in reverse mode, Propagation delay measurement – BECKHOFF EtherCAT Technology Section I User Manual
Page 70
Distributed Clocks
I-50
Slave Controller
– Technology
9.1.2
Propagation Delay Measurement
Since each slave introduces a small processing/forwarding delay in each direction (within the device
and also in the PHY), as well as the cable between the ESCs has a delay, the propagation delay
between Reference Clock and the respective slave clock has to be considered for the synchronization
of the slave clocks.
1. For measuring the propagation delay, the master sends a broadcast write to register DC Receive
Time Port 0 (at least the first byte).
2. Each slave device stores the time of its local clock when the first bit of the Ethernet preamble of
the frame was received, separately for each port (Receive Time Port 0-3 registers).
3. The master reads all time stamps and calculates the delay times with respect to the topology. The
delay time between Reference Clock and an individual slave is written to the
slave’s System Time
Delay register (0x0928:0x092B).
The receive time registers are used to sample the receive time of a specific frame (a broadcast write
to Receive Time Port 0 register).
The clocks must not be synchronized for the delay measurement, only local clock values are used.
Since the local clocks of the slaves are not synchronized, there is no relation between the Receive
Times of different slaves. So the propagation delay calculation has to be based on receive time
differences between the ports of a slave.
Devices with two ports do not need to support Distributed Clocks at all, their delay is treated as an
additional “wire delay” between the surrounding DC-capable slaves. Devices with more than 2 ports
have to support at least propagation delay measurements (DC Receive Times).
NOTE: Some ESCs use the broadcast write to Receive Time Port 0 register as an indicator to latch the receive
times of the next frame at all ports other than port 0 (if port 0 is open). Thus, another frame which is still traveling
around the ring might trigger the measurement, and the receive times do no correlate. For these ESCs, the ring
has to be empty before the broadcast write is issued. Refer to Section II Receive Time Port x registers for further
information.
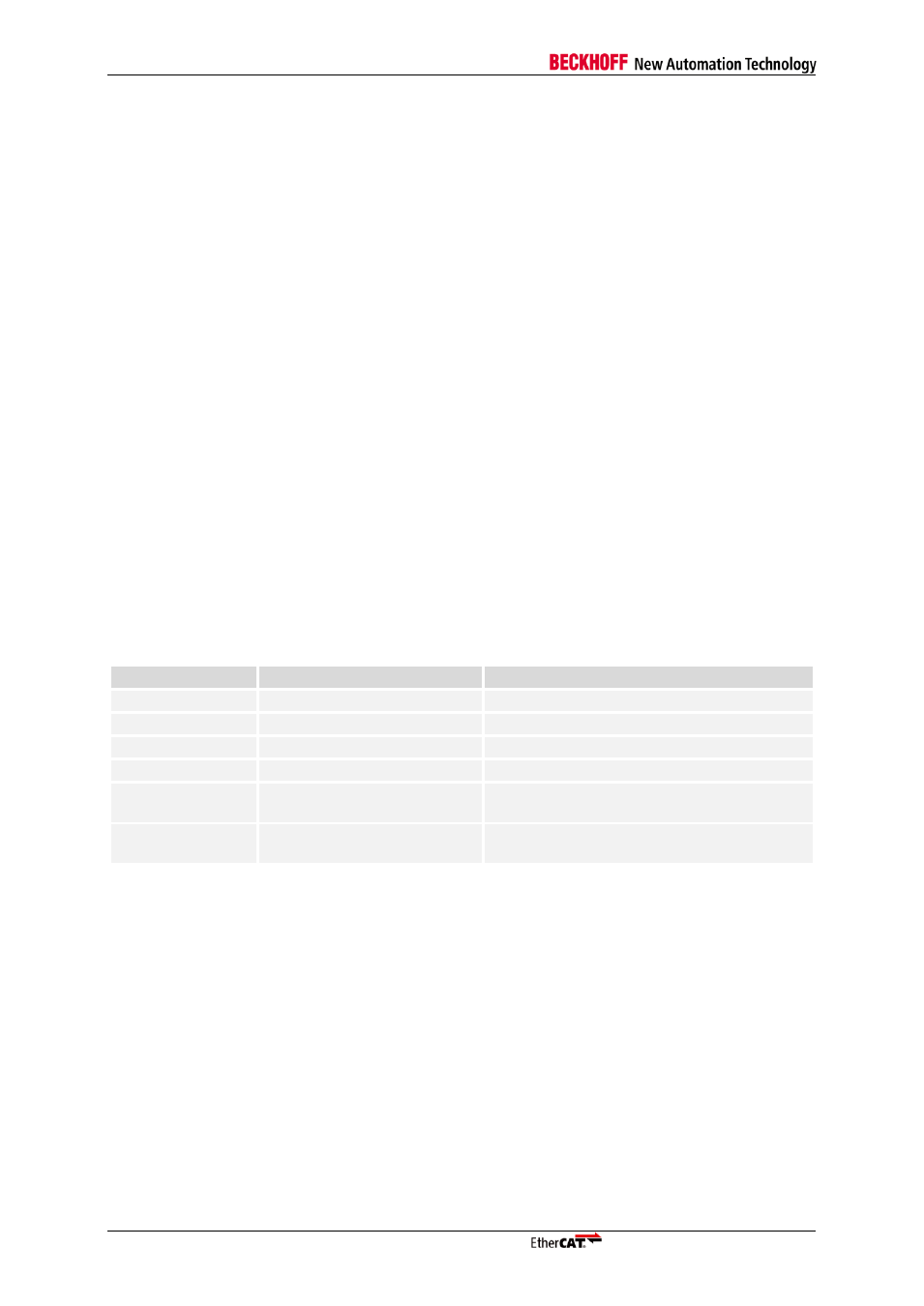
Table 25: Registers for Propagation Delay Measurement
Register Address
Name
Description
0x0900:0x0903
Receive Time Port 0
Local time when receiving frame on Port 0
0x0904:0x0907
Receive Time Port 1
Local time when receiving frame on Port 1
0x0908:0x09B
Receive Time Port 2
Local time when receiving frame on Port 2
0x090C:0x090F
Receive Time Port 3
Local time when receiving frame on Port 3
0x0918:0x091F
Receive Time ECAT
Processing Unit
Local time when receiving frame at the ECAT
Processing Unit
0x0936
Receive Time Latch Mode
ET1200: Receive time latching in forwarding
or reverse mode
9.1.2.1
Propagation Delay Measurement in Reverse Mode
For redundancy operation, it is necessary to perform propagation delay measurements either in
forwarding mode (master connected to port 0), or in reverse mode (master connected to port 1-3). For
ET1200, care has to be taken because the measurement principle is slightly different for these two
ESC types: DC Receive Time Latch Mode register 0x0936 has to be used. As ET1100 and IP Core do
not require register 0x0936, the following rules can be used for propagation delay measurement in a
mixed ET1200/ET1100/IP Core environment (ESC20 does not support propagation delay
measurement in reverse mode).
In forwarding mode, the master should write 0x00 to register 0x0936 of all slaves, and perform the
delay measurement afterwards.
In reverse mode, the master should write 0x01 to register 0x0936 of all slaves, and perform the
delay measurement afterwards.
Please refer to section II for more details on DC Receive Time Latch Mode register 0x0936 and
receive time stamps in 0x0900:0x09F.