I.9 parameter table – Yaskawa iQpump Micro Quick Start User Manual
Page 91
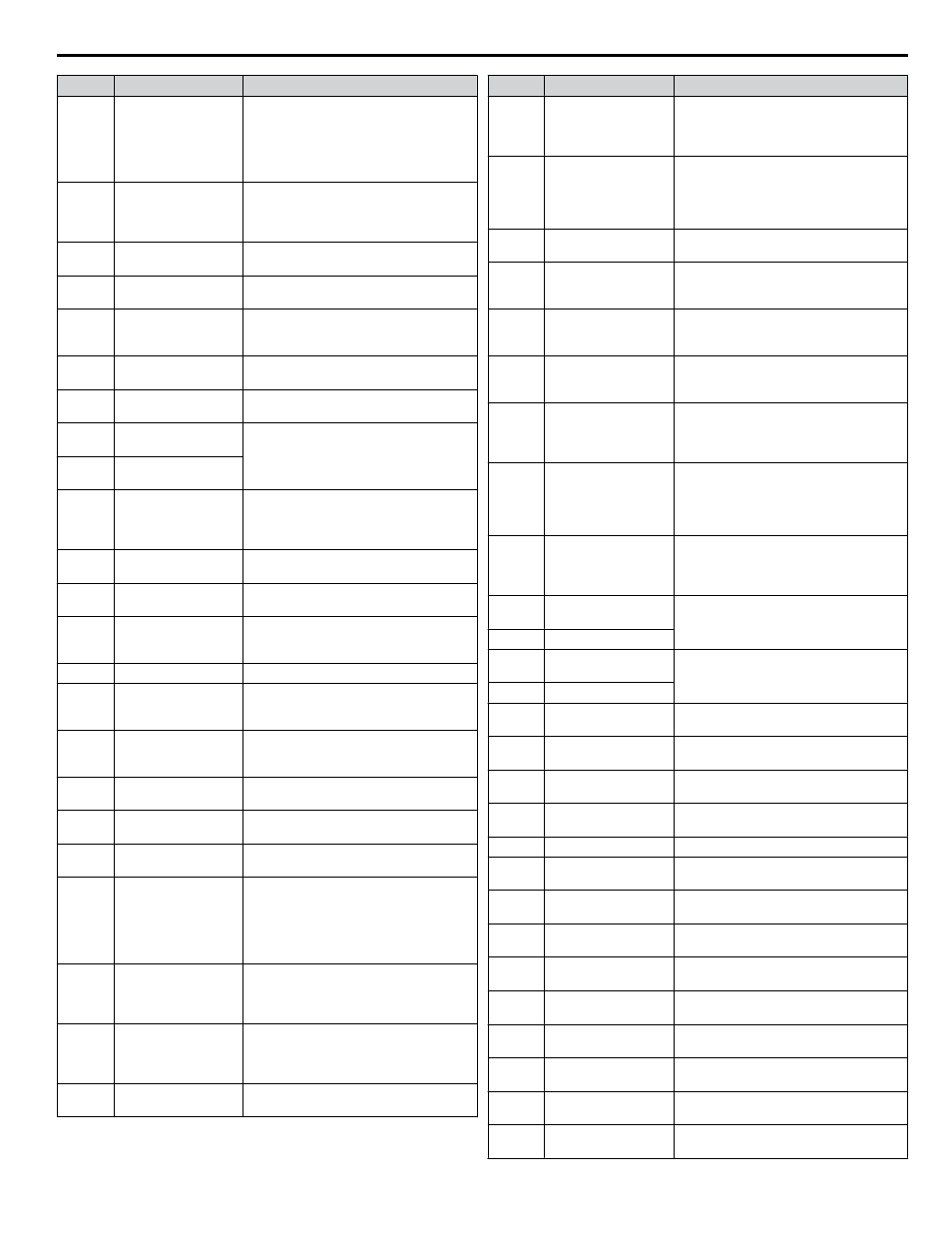
No.
Name
Description
b3-10
Speed Search
Detection
Compensation Gain
Sets the gain which is applied to the speed
detected by Speed Estimation Speed Search
before the motor is reaccelerated. Increase
this setting if ov occurs when performing
Speed Search after a relatively long period
of baseblock.
b3-14
Bi-Directional Speed
Search Selection
0: Disabled (uses the direction of the
frequency reference)
1: Enabled (drive detects which way the
motor is rotating)
b3-17
Speed Search Restart
Current Level
Sets the Speed Search restart current level
as a percentage of the drive rated current.
b3-18
Speed Search Restart
Detection Time
Sets the time to detect Speed Search restart.
b3-19
Number of Speed
Search Restarts
Sets the number of times the drive can
attempt to restart when performing Speed
Search.
b3-24
Speed Search Method
Selection
0: Current Detection
1: Speed Estimation
b3-25
Speed Search Wait
Time
Sets the time the drive must wait between
each Speed Search restart attempt.
b4-01
Timer Function On-
Delay Time
Sets the on-delay and off-delay times for a
digital timer output (H2-oo=12).
The output is triggered by a digital input
programmed to H1-oo=18).
b4-02
Timer Function Off-
Delay Time
b5-01
PID Function Setting
0: Disabled
1: Enabled (PID output becomes output
frequency reference, deviation D
controlled)
b5-02
Proportional Gain
Setting (P)
Sets the proportional gain of the PID
controller.
b5-03
Integral Time Setting
(I)
Sets the integral time for the PID controller.
b5-04
Integral Limit Setting
Sets the maximum output possible from the
integrator as a percentage of the maximum
output frequency.
b5-05
Derivative Time (D)
Sets D control derivative time.
b5-06
PID Output Limit
Sets the maximum output possible from the
entire PID controller as a percentage of the
maximum output frequency.
b5-07
PID Offset Adjustment
Applies an offset to the PID controller
output. Set as a percentage of the maximum
output frequency.
b5-08
PID Primary Delay
Time Constant
Sets a low pass filter time constant on the
output of the PID controller.
b5-09
PID Output Level
Selection
0: Direct acting
1: Inverse acting
b5-10
PID Output Gain
Setting
Sets the gain applied to the PID output.
b5-11
PID Output Reverse
Selection
0: Negative PID output triggers zero
limit.
1: Rotation direction reverses with negative
PID output.
Note: When using setting 1, make sure
reverse operation is permitted by b1-04.
b5-12
Feedback Loss 4 to 20
mA Detection
Selection
0: Disabled
1: Alarm only
2: Fault
3: Run at b5-13
b5-13
Feedback Loss Goto
Frequency
Sets the speed at which the drive will run if
a 4 to 20 mA wire break is detected on the
PID Feedback and when b5-12 is set to 3
(Run at b5-13).
b5-14
Feedback Loss of
Prime Level
Detects loss of prime in the pump when a
wire break condition has occurred.
No.
Name
Description
b5-15
Feedback Loss Go To
Frequency Time Out
When b5-12 = 3 and the Feedback signal is
lost, the drive will run at the b5-13 speed for
the b5-15 time, after which the drive will
fault on Feedback Loss (FDBKL).
b5-16
Feedback Loss Start
Delay
When an AUTO Run command is initiated,
the drive will not fault on Feedback Loss
(FDBKL) or use the Feedback Loss GoTo
Frequency (b5-13) until the b5-16 time has
expired.
b5-17
PID Accel/Decel Time Sets the acceleration and deceleration time
to PID setpoint.
b5-32
Integrator Ramp Limit
When set to a value greater than zero, the PI
Integrator is forced to be within +/- this
amount of the soft starter output.
b5-34
PID Output Lower
Limit
Sets the minimum output possible from the
PID controller as a percentage of the
maximum output frequency.
b5-35
PID Input Limit
Limits the PID control input (deviation
signal) as a percentage of the maximum
output frequency. Acts as a bipolar limit.
b5-39
PID System Units
Display Digits
0: No decimal place
1: One decimal place
2: Two decimal places
3: Three decimal places
b5-40
Frequency Reference
Monitor Content
during PID
0: Display the frequency reference
(U1-01) after PID compensation has been
added.
1: Display the frequency reference (U1-01)
before PID compensation has been added.
b5-47
Reverse Operation
Selection 2 by PID
Output
0: Zero limit when PID output is a negative
value.
1: Reverse operation when PID output is
a negative value
b6-01
Dwell Reference at
Start
Parameters b6-01 and b6-02 set the
frequency to hold and the time to maintain
that frequency at start.
b6-02
Dwell Time at Start
b6-03
Dwell Reference at
Stop
Parameters b6-03 and b6-04 set the
frequency to hold and the time to maintain
that frequency at stop.
b6-04
Dwell Time at Stop
C1-01
Acceleration Time 1
Sets the time to accelerate from 0 to
maximum frequency.
C1-02
Deceleration Time 1
Sets the time to decelerate from maximum
frequency to 0.
C1-03
Acceleration Time 2
Sets the time to accelerate from 0 to
maximum frequency.
C1-04
Deceleration Time 2
Sets the time to decelerate from maximum
frequency to 0.
C1-09
Fast Stop Time
Sets the time for the Fast Stop function.
C1-10
Accel/Decel Time
Setting Units
0: 0.01 s (0.00 to 600.00 s)
1: 0.1 s (0.0 to 6000.0 s)
C1-11
Accel/Decel Time
Switching Frequency
Sets the frequency to switch between accel/
decel time settings.
C1-14
Accel/Decel Rate
Frequency
Sets the base frequency used to calculate
acceleration and deceleration times.
C2-01
S-Curve Characteristic
at Accel Start
S-curve at acceleration start.
C2-02
S-Curve Characteristic
at Accel End
S-curve at acceleration end.
C2-03
S-Curve Characteristic
at Decel Start
S-curve at deceleration start.
C2-04
S-Curve Characteristic
at Decel End
S-curve at deceleration end.
C3-01
Slip Compensation
Gain
Sets the gain for the motor slip
compensation function used for motor 1.
C3-02
Slip Compensation
Primary Delay Time
Adjusts the slip compensation function
delay time used for motor 1.
i.9 Parameter Table
YASKAWA TOEP YAIQPM 02B YASKAWA AC Drive - iQpump Micro Quick Start Guide
91