I.9 parameter table – Yaskawa iQpump Micro Quick Start User Manual
Page 99
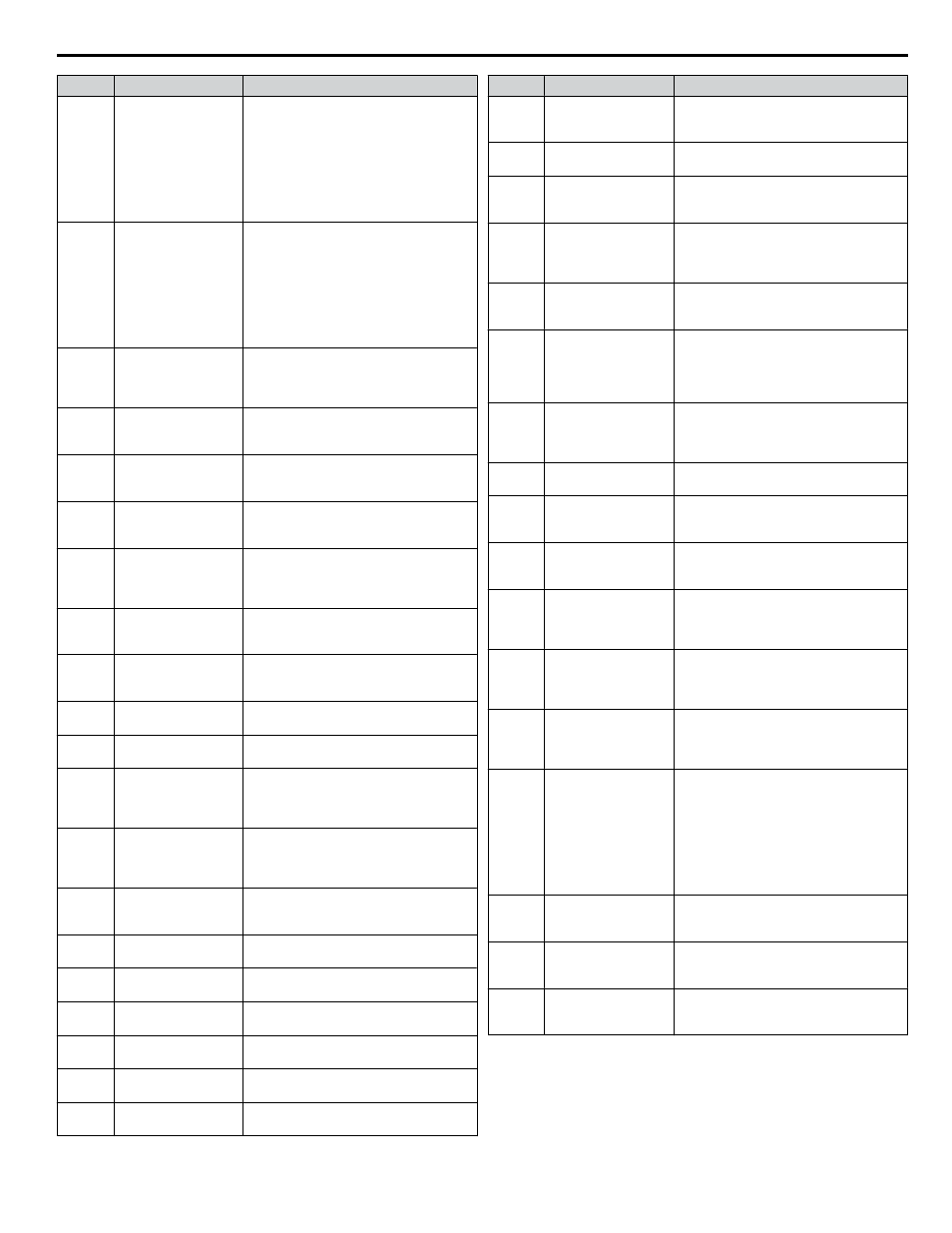
No.
Name
Description
P4-13
Thrust Bearing
Deceleration Time
Sets the amount of time it takes to bring the
drive from the Thrust Frequency set in
P4-12 to stop when Thrust Mode is active.
When the Run command is removed while
the drive is operating in Thrust Mode above
the Thrust Frequency, the time set in this
parameter is used when the frequency
reference is at or below the thrust
frequency.
P4-17
Utility Start Delay
Sets the amount of time that the drive will
delay starting if a Run command is present
at power-up.
When P1-01, Pump Mode, is set to 3
(MEMOBUS network), the drive is
unavailable to the network (Pump Off
Network) when the function is active.
Setting this parameter to 0.0 disables the
function.
P4-21
Low City Input Select
0: Normally open (closed indicates the Low
City Pressure condition)
1: Normally closed (open indicates the
Low City Pressure condition)
P4-22
Low City On-Delay
Time
Sets the amount of time a Low City Pressure
condition needs to be present before the
drive will stop.
P4-23
Low City Off-Delay
Time
Sets the amount of time a Low City Pressure
condition needs to be absent before the
drive will restart.
P4-24
Low City Alarm Text
0: Low city pressure
1: Low suction pressure
2: Low water in tank
P4-25
Remote Drive Disable
Selection
0: Normally open (closed indicates the
Remote Drive Disable condition)
1: Normally closed (open indicates the
Remote Drive Disable condition)
P4-26
Remote Drive Disable
On-Delay
Sets the amount of time a Remote Drive
Disable condition must be present before
the drive will stop.
P4-27
Remote Drive Disable
Off-Delay
Sets the amount of time a Remote Drive
Disable condition must be absent before the
drive will run.
P4-29
Lube Pump Message
Text
0: Lube Pump
1: Digital Out Delay
P4-30
Lube Pump Active
During Run
0: Disabled
1: Active During Run
P4-31
Lube Pump / Digital
Output Delay Timer
Sets the amount of time to delay the drive
output and to energize the digital output
(H2-oo = 8B) before the drive is allowed
to run.
P4-32
Pre-charge Level 2
For normal PI operation during Pre-charge
2, if the PI Feedback signal rises above the
P4-32 level, Pre-charge 2 is cancelled and
the drive resumes normal operation.
P5-01
HAND Mode Ref
Source
Sets the HAND Mode reference.
0: Analog input
1: P5-02 (HAND reference)
P5-02
HAND Reference 1
Sets the frequency reference used when
HAND Mode is active and P5-01 is set to 1.
P5-03
HAND/AUTO During
Run Selection
0: Disabled
1: Enabled
P5-04
HAND Key Function
Selection
0: Disabled
1: Enabled
P5-05
HAND Reference 2
Sets the frequency reference used when
HAND Mode 2 is active.
P5-06
HAND Ref. 1 Loss of
Prime Level
Detects loss of prime in the pump when in
HAND Mode.
P5-07
HAND Ref. 2 Loss of
Prime Level
Detects loss of prime in the pump when in
HAND Mode 2.
No.
Name
Description
P5-09
HAND References Set
via Motor Operated Pot
Selection
0: Disabled
1: Enabled
P7-01
Anti-Jam Operation
Selection
0: Disabled
1: Enabled
P7-02
Anti-Jam Cycle Count
Sets the maximum number of cycles that
will be attempted before triggering and
Anti-Jam fault.
P7-03
Anti-Jam Detection
Current Level
Sets the current level at start that will trigger
the anti-jam function.
Set as a percentage of the motor rated
current.
P7-04
Anti-Jam Detection
Time at Start
Sets the length of time that current must rise
above the level set in P7-03 to trigger the
anti-jam function.
P7-05
Anti-Jam During Run
Current
Sets the current level during run that will
trigger the anti-jam function.
Set as a percentage of motor rated current.
Setting this parameter to 0 will disable anti-
jam during run.
P7-06
Anti-Jam During Run
Time
Sets the length of time that the current must
rise above the level set in P7-05 to trigger
the anti-jam function.
Restricted to simplex only.
P7-07
Anti-Jam Frequency
Reference
Sets the maximum speed allowed when the
anti-jam function is active.
P7-08
Anti-Jam Release
Time
Sets the length of time that the current must
fall below the level set in P7-03 to resume
normal operation.
P9-01
Lead Drive Selection
0: Next available
1: Lowest runtime
2: Stop history
P9-02
Feedback Source
0: Analog only
1: Ana->Net, No Alrm
2: Ana->Net, Alarm
3: Network only
P9-03
Alternation Time
Specifies the time for a drive to request
alternation.
Setting this parameter to 0 disables the
function.
P9-04
Alternation Mode
0: FIFO auto
1: FIFO forced
2: LIFO
3: FIFO @sleep
P9-05
Lag Drive Mode
0: Fixed speed. The drive runs at the
P9-06 setting after the time set in P9-07
expires.
2: Turn off. The drive stops running when
it switches to a lag drive after the time set
in P9-07 expires.
3: Follow Lead Speed. The drive will follow
the speed of the current lead drive, applying
P9-30 gain and P9-31 bias.
P9-06
Lag Fixed Speed
Sets the speed at which the drive will run
when the drive changes from a lead to a lag
and the time set in P9-07 has expired.
P9-07
Lag Fixed Speed Delay
Specifies how long speed is latched before
performing the function specified in P9-05
when the drive changes from a lead to a lag.
P9-08
Add Pump Mode
0: Output frequency
1: Feedback
2: Feedback + Fout
i.9 Parameter Table
YASKAWA TOEP YAIQPM 02B YASKAWA AC Drive - iQpump Micro Quick Start Guide
99