1 protocol specification and bus structure – Watson-Marlow MM420 User Manual
Page 102
3 Functions
Issue 10/06
MICROMASTER 420 Operating Instructions
102
6SE6400-5AA00-0BP0
3.7.1.1
Protocol specification and bus structure
The USS protocol has the following significant features:
Supports
a multi-point-capable link, e.g. EIA RS 485 hardware or
a point-to-point link, e.g. EIA RS 232
Master-slave access technique
Single-master system
Maximum 32 nodes (max. 31 slaves)
Operation with variable or fixed telegram length
Simple, reliable telegram frames
The same bus mode of operation as with the PROFIBUS (DIN 19245 Part 1)
Data interface to the basic unit according to PROFILE variable-speed drives.
This means that, when the USS is being used, information is transferred to the
drive in the same way as with the PROFIBUS-DP.
Can be used for start-up, service and automation
PC-based service tools (e.g. STARTER and DriveMonitor)
Can be easily implemented in customized systems
Protocol specification
The USS protocol defines an access technique according to the master-slave
principle for communications via a serial bus. The point-to-point link is included as
a sub-quantity.
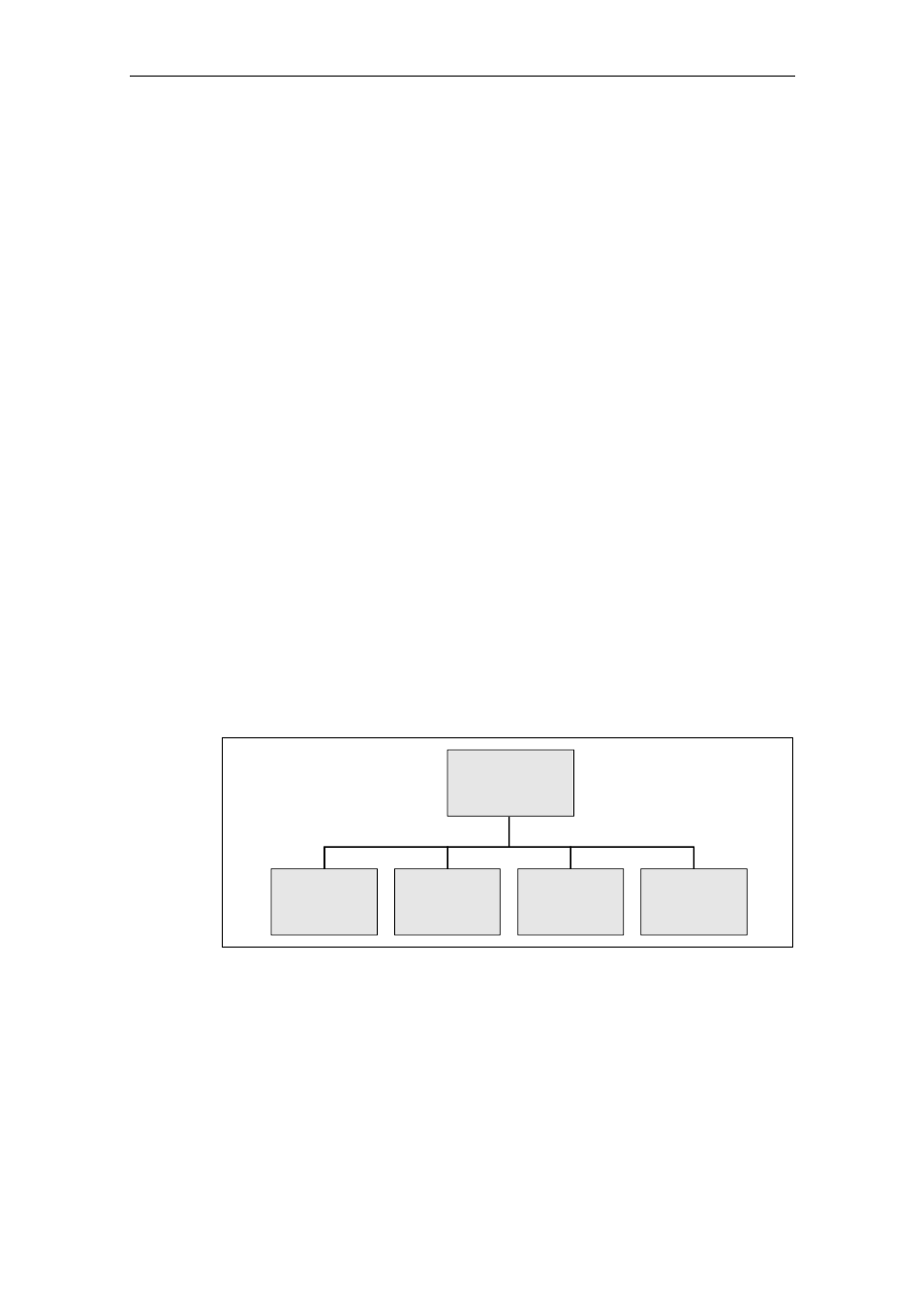
One master and a maximum of 31 slaves can be connected to the bus. The
individual slaves are selected by the master using an address character in the
telegram. A slave can never transmit without first being initiated by the master so
that direct information transfer between individual slaves is not possible. The
master function cannot be transferred (single-master system). The following
illustration shows a bus configuration using drive technology as an example.
MICROMASTER
Higher-level computer
"Master"
MICROMASTER
MICROMASTER
MICROMASTER
"Slave"
"Slave"
"Slave"
"Slave"
Fig. 3-31
Serial linking of MICROMASTER (slaves) with a higher-level computer
(master)