Watson-Marlow MM420 User Manual
Page 159
Issue 10/06
3 Functions
MICROMASTER 420 Operating Instructions
6SE6400-5AA00-0BP0
159
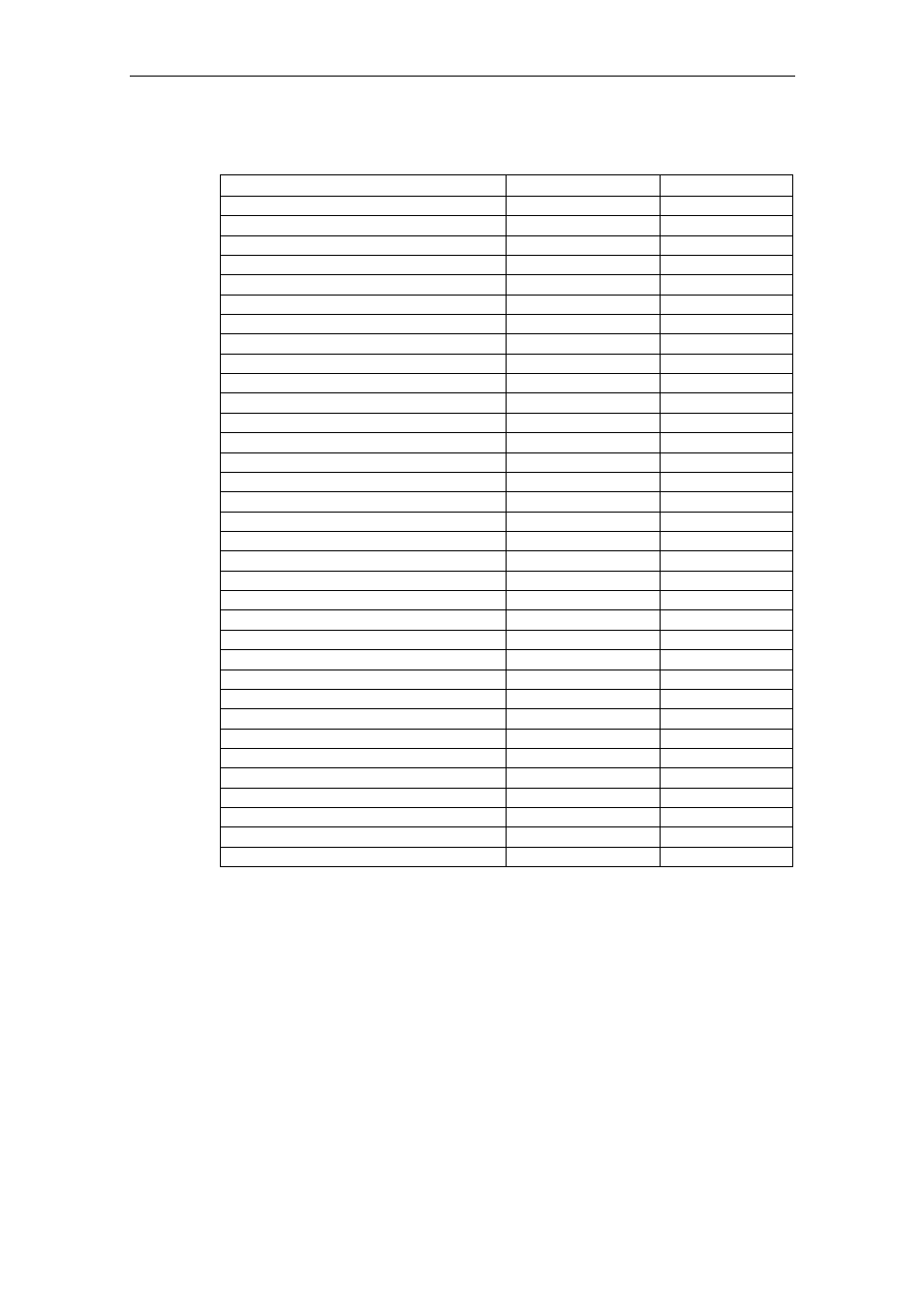
Table 3-31
Partial excerpt of monitoring functions / messages
Functions / states
Parameter / bit number
Function chart
Drive ready
52.0
-
Drive ready to run
52.1
-
Drive running
52.2
-
Drive fault active
52.3
-
OFF2 active
52.4
-
OFF3 active
52.5
-
On inhibit active
52.6
-
Drive warning active
52.7
-
Deviation setpoint – actual value
52.8
-
PZD control
52.9
-
Maximum frequency reached
52.A
-
Warning: Motor current limit
52.B
-
Motor holding brake active
52.C
-
Motor overload
52.D
-
Motor runs right
52.E
-
Drive inverter overload
52.F
-
DC brake active
53.0
-
Ramping finished
53.9
-
PID output R2294 == P2292 (PID_min)
53.A
FP5100
PID output R2294 == P2291 (PID_max)
53.B
FP5100
Download data set 0 from AOP
53.E
-
Download data set 0 from AOP
53.F
-
|f_act| > P1080 (f_min)
53.2 2197.0
FP4100
|f_act| <= P2155 (f_1)
53.5 2197.1
FP4110
|f_act| > P2155 (f_1)
53.4 2197.2
FP4110
f_act > zero
2197.3
FP4110
f_act >= setpoint (f_set)
53.6 2197.4
-
|f_act| >= P2167 (f_off)
53.1 2197.5
FP4100
|f_act| > P1082 (f_max)
2197.6
-
f_act == setpoint (f_set)
2197.7
FP4110
i_act r0068 >= P2170
53.3 2197.8
FP4100
Approx. Vdc_act < P2172
53.7 2197.9
FP4110
Approx. Vdc_act > P2172
53.8 2197.A
FP4110
No-load operation
2197.B
-