Yaskawa input instances, Yaskawa input instances -8 – Yaskawa CM092 User Manual
Page 37
EtherNet/IP 3-8
Yaskawa Input Instances
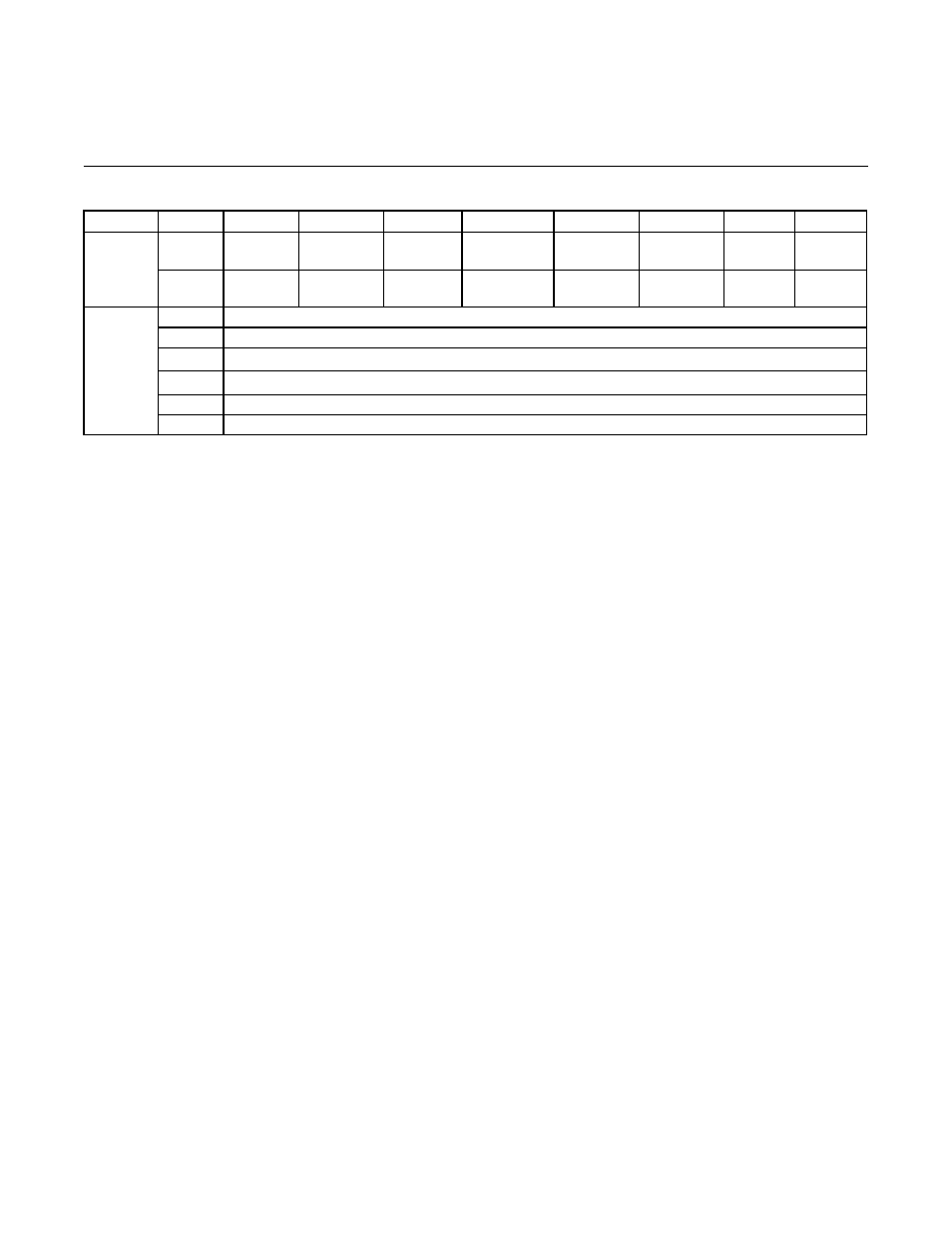
Yaskawa Standard Speed/Torque Input Instance 151 (97h)
Note:
1
F7U, G7U and G5M in FVC mode only
Running Forward:
Running in the forward direction
ZSP:
At Zero Speed
Running Reverse:
Running in the reverse direction
Reset:
Fault reset
Speed Agree:
@ commanded speed
Ready:
Drive Ready
Alarm:
Drive Alarm
Fault:
Drive Fault
OPE:
Drive OPE Fault
UV:
Drive Undervoltage Fault
Local/Remote:
0 = Drive is in Local Control
1 = Drive is in Remote Control
Terminal M1-M2:
Multi-function Digital Output 1 (H2-01)
Terminal P1:
Multi-function Digital Output 2 (H2-02)
Terminal P2:
Multi-function Digital Output 3 (H2-03)
ZSV:
Zero Servo (F7U, G7U and G5M in Closed-loop flux vector mode (FVC) only)
Output Frequency:
Output frequency of the drive
Torque Reference:
Percent of rated torque
Output Current:
Parameter o2-04 for kVA model - Scaling is 0.01A for kVA models 00h ~ 06h and 20h ~ 26h
Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Instance
0
FAULT
ALARM
READY
Speed
Agree
Reset
Running
REV
ZSP
Running
FWD
1
ZSV
-
Terminal
P2
Terminal
P1
Terminal
M1-M2
Local/
Remote
UV
OPE
151
2
Output Frequency (Low Byte) [scaled by parameter o1-03]
3
Output Frequency (High Byte) [scaled by parameter o1-03]
4
Torque Reference
1
(Low Byte) [0.1%]
5
Torque Reference
1
(High Byte) [0.1%]
6
Output Current (Low Byte) [0.1A or 0.01A]
7
Output Current (High Byte) [0.1A or 0.01A]