Mounting surface – Adept s350 Cobra User Manual
Page 19
Chapter 2: Robot Installation
Mounting Surface
The Adept Cobra s350 robot is designed to be mounted on a smooth, flat, level surface. The
mounting surface must be rigid enough to prevent vibration and flexing during robot
operation. Adept recommends a 25 mm (1 in.) thick steel plate mounted to a rigid tube frame.
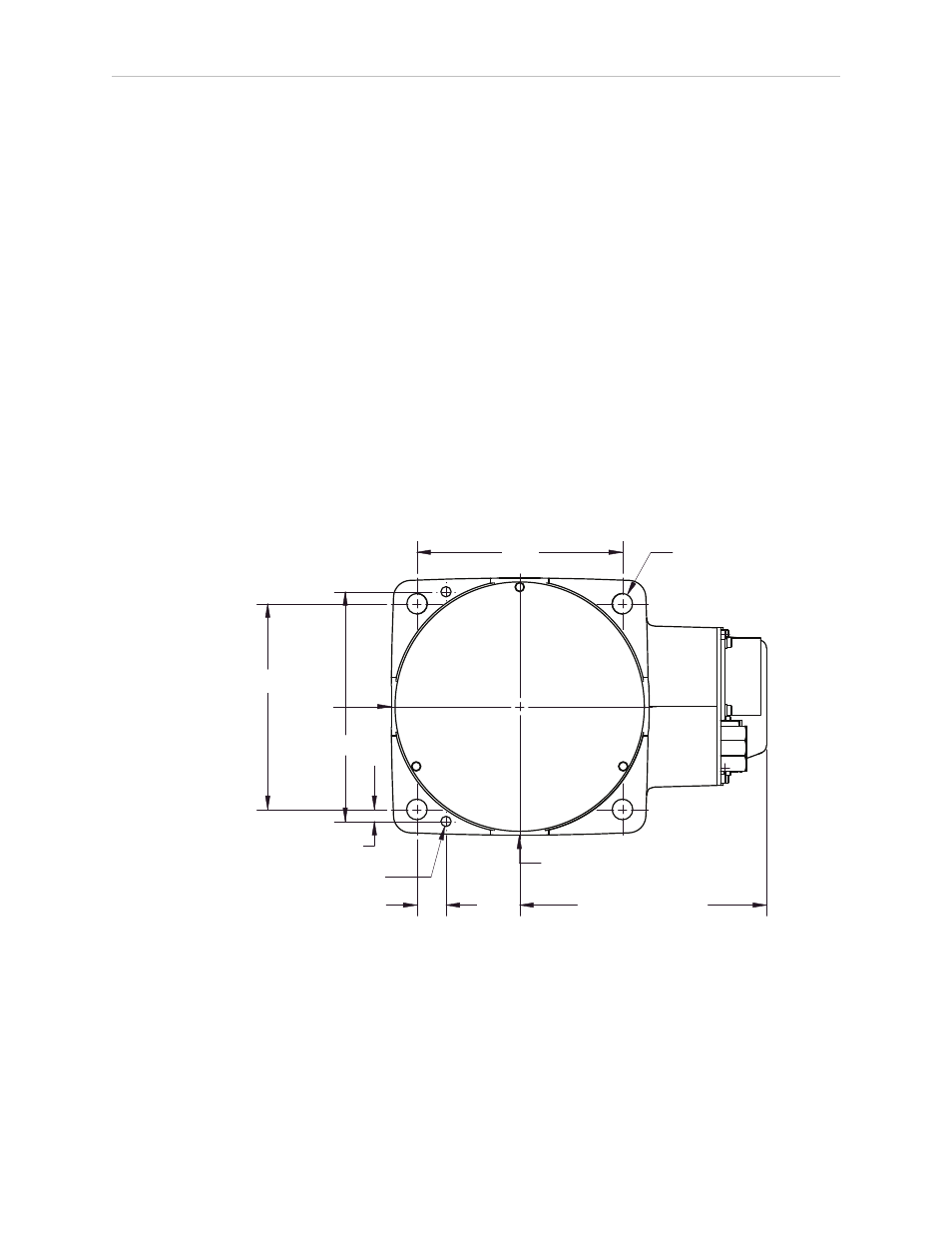
Excessive vibration or mounting flexure will degrade robot performance. Figure 2-2 shows the
mounting hole pattern for the Adept Cobra s350 robot.
NOTE: On the under-side of the base there are two holes that can be used as
locating points for user-installed dowel pins in the mounting surface. See Figure 2-2
for the hole dimension and location. Using locating pins can improve the ability to
remove and reinstall the robot in the same position.
The Adept Cobra s350 robot can be mounted on a moving platform with proper attention paid
to adequately supporting the robot cabling. The motor/encoder cable connecting the robot to the
MB-40R/eMB-40R is not designed to withstand repeated bending operations and has a
minimum recommended bend radius of 200 mm. The connectors on this cable are not
designed to support any dynamic forces and Adept always advises users to support the
weight of the cable with external supports and tie-downs. Any additional user cabling should
be installed with user-designed cabling supports that do not use these motor/encoder
connectors as attachment points for auxiliary cabling.
120
120
7
17
R 1500
R 1500
144
(291 for Cabling)
4x Ø 12 Thru
2x Ø 6 H7
+0.012
0
134 ± 0.005
Units are mm
Figure 2-2. Mounting Hole Pattern for Robot
Adept Cobra s350 User's Guide, Rev. D
Page 19 of 94