Yaskawa MP900 Teach Pendant User Manual
Page 73
A.3 MECHATROLINK Servo Status
A -5
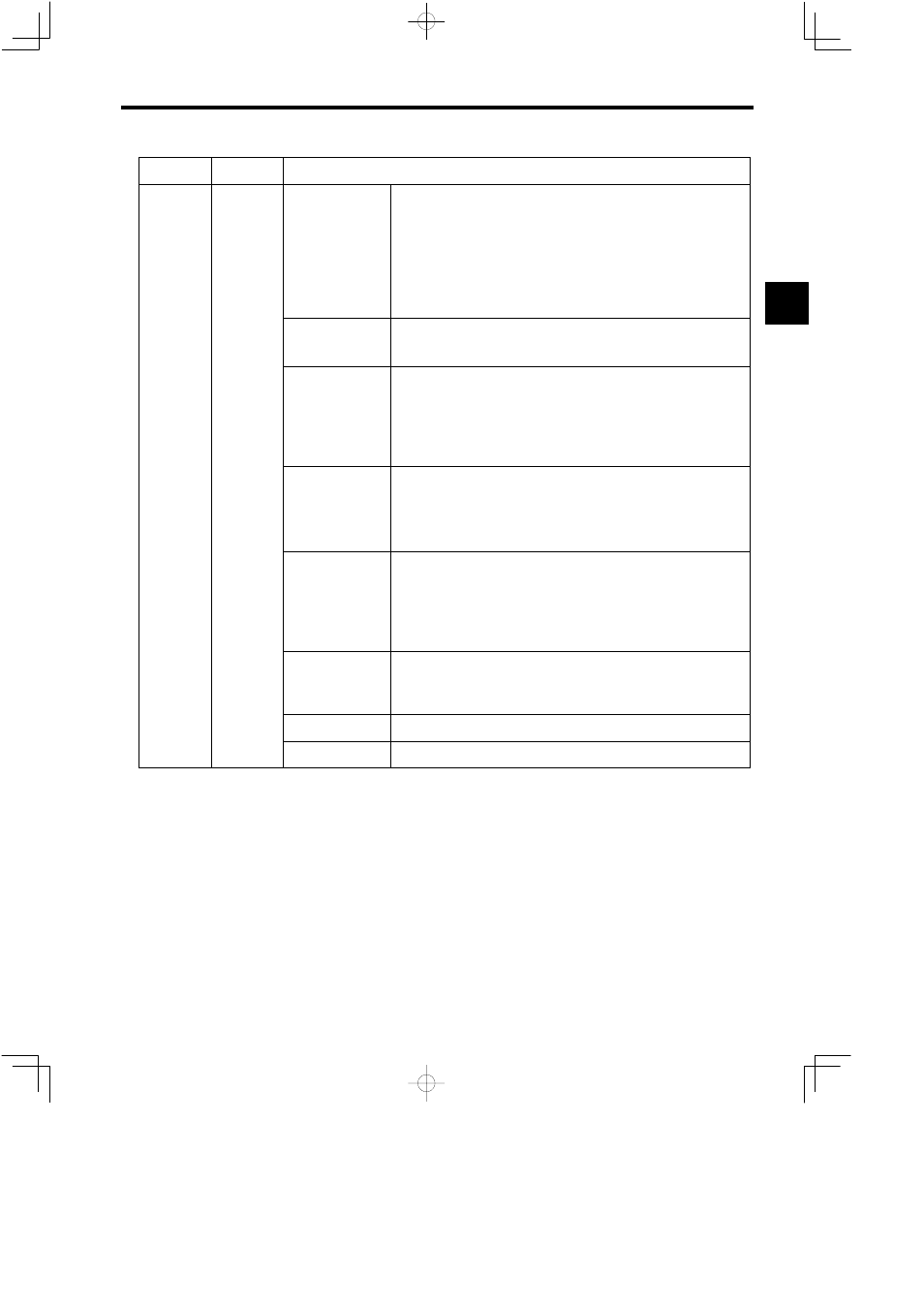
Name
Details
# Register
b8: DEN
Distribution Completed
Set to 1 when the final target position (TPOS) equals the reference position
(APOS) after acceleration/deceleration filter distribution has been completed.
S
DEN remains as 1 when a motion command with no motion distance is
used.
S
Becomes 0 at least once even when the motion is completed within one
communications cycle.
b9: T_LIM
Within Torque Limit
Set to 1 when within torque limits.
b10: L_CMP
Latch Completed
The Servo is in latch mode when a latch command is being received. In latch
mode, this flag becomes 1 when latch signals are received and latch position-
ing has been completed.
The flag is 0 when the power is turned ON.
b11: NEAR
Near Positioning
Set to 1 when the final target position (TPOS−Usr_ofst−Mlck_ofst) of the
machine coordinate system is near the positioning range.
S
DEN has no affect on NEAR.
b12: P−SOT
Positive Software Limit
Set to 1 when the absolute position (APOS) or the reference position (POS)
exceeds the positive software limit.
S
The software limit will not be detected when an incremental PG is used
and the zero point has not been set.
b13: N−SOT
Negative Software Limit
Set to 1 when the absolute position (APOS) or the reference position (POS)
exceeds the reverse software limit.
b14: Reserved
Reserved
b15: Reserved
Reserved
A