Yaskawa MotionWorks IEC Hardware User Manual
Page 153
MotionWorks IEC Hardware Configuration – 2013-03-26
150
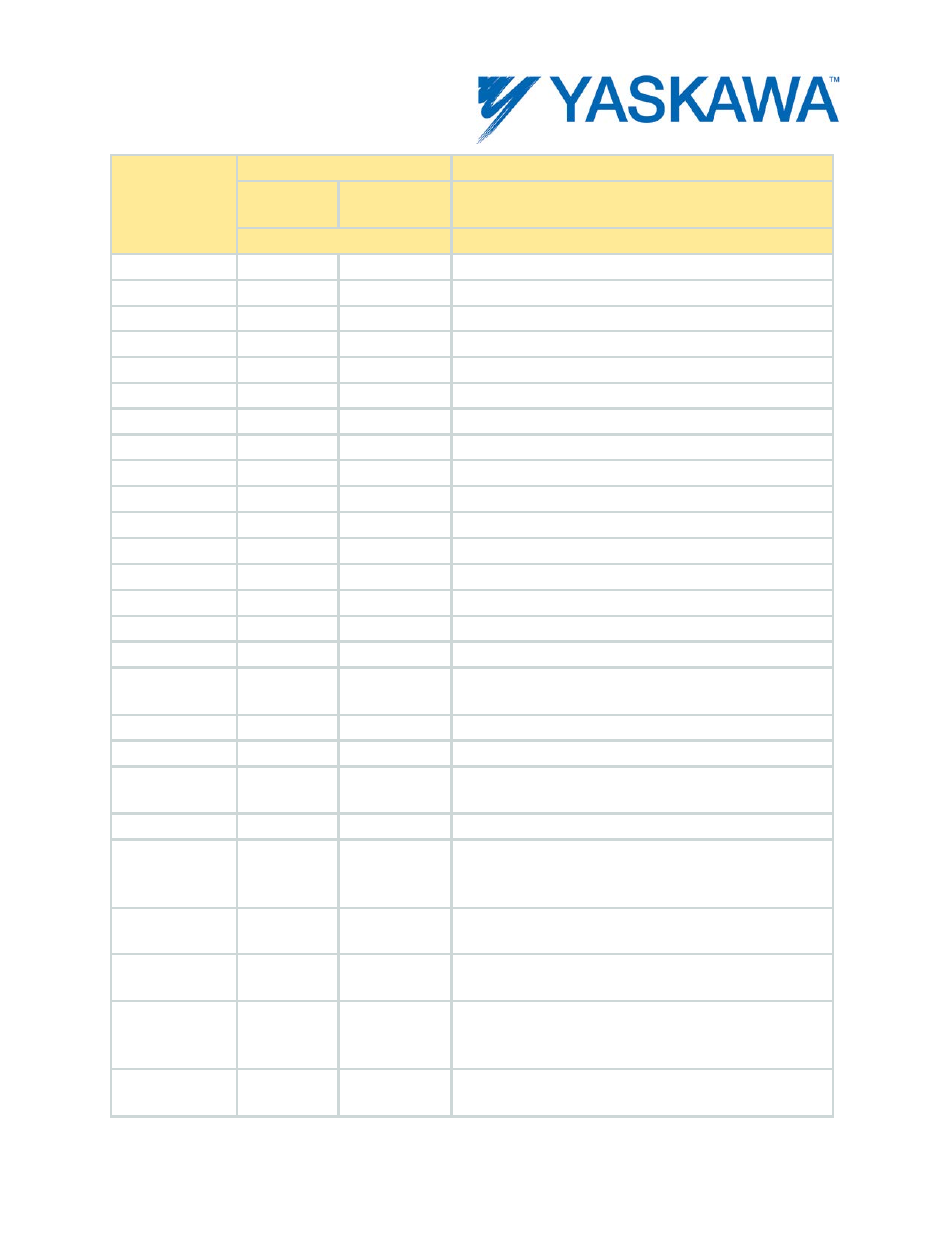
Hex Code
Description
ErrorClass
AxisErrorID
ErrorClass+AxisErrorID output from
MC_ReadAxisError
AlarmID
AlarmID output from Y_ReadAlarm
app
340C
1233
Acceleration is less than or equal to zero.
app
340C
1234
Deceleration is less than or equal to zero.
app
340C
1235
Torque is less than or equal to zero.
app
340C
1236
Time is less than or equal to zero
app
340C
1237
Specified time was less than zero.
app
340C
1238
Specified scale was less than or equal to zero.
app
340C
1239
Velocity is negative.
app
340C
123A
Denominator is zero.
app
340C
123B
Jerk is less than or equal to zero.
app
340C
123C
TorqueRamp is less than or equal to zero.
app
340C
123D
Engage position is outside the table domain.
app
340C
123E
Negative engage width.
app
340C
123F
Disengage position is outside the table domain.
app
340C
1240
Negative disengage width.
app
340C
1241
StartPosition is outside of master's range.
app
340C
1242
EndPosition is outside of master's range.
app
340C
1310
All error codes for invalid input data range from 0x1211
to 0x121f.
app
340C
1311
The specified Pn does not exist.
app
340C
1312
The mask does not correspond to valid tracks.
app
340C
1313
The profile must start with relative time equal to zero,
and the time must be increasing.
app
340C
1314
The specified cam file does not exist.
app
340C
1315
Invalid header for the cam file. Cam tables must have a
header indicating the number of rows, number of
columns and a feed forward velocity flag
app
340C
1316
The first (master) column must be either increasing or
decreasing.
app
340C
1317
Cam table reference does not refer to a valid cam
table.
app
340C
1318
The engage phase exceeded the time limit. Slave axis
could not attain the target position and velocity within
the user specified time limit.
app
340C
1319
The engage phase exceeded the distance limit. Slave
axis could not attain the target position and velocity