Yaskawa CIMR-PUxA User Manual
Page 204
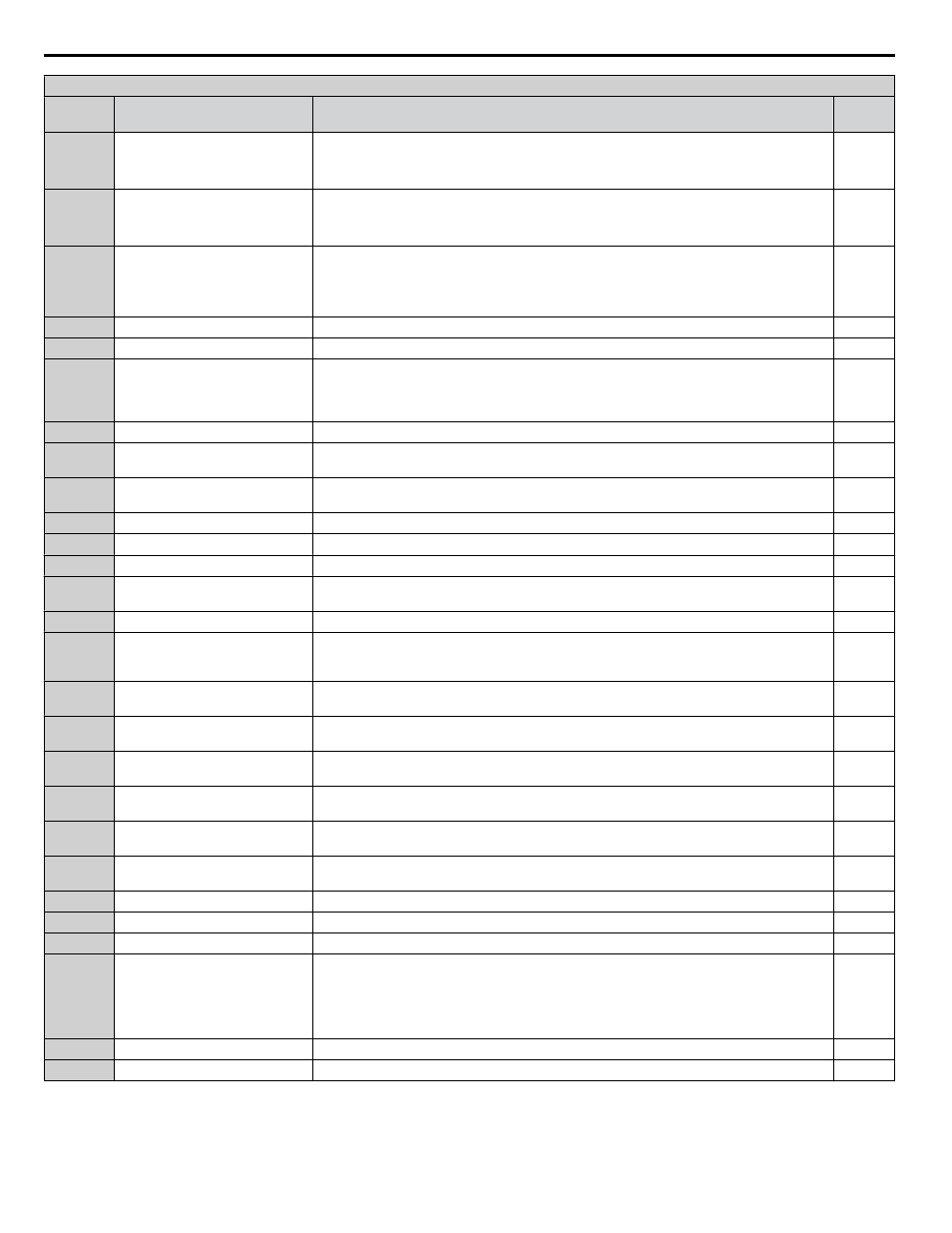
H1 Multi-Function Digital Input Selections
H1-oo
Setting
Function
Description
Page
41
Reverse run command
(2-Wire sequence)
Open: Stop
Closed: Reverse run
Note:
Cannot be set together with settings 42 or 43.
–
42
Run command
(2-Wire sequence 2)
Open: Stop
Closed: Run
Note:
Cannot be set together with settings 40 or 41.
–
43
FWD/REV command
(2-Wire sequence 2)
Open: Forward
Closed: Reverse
Note:
Determines motor direction, but does not issue a Run command. Cannot be set
together with settings 40 or 41.
–
47
Node setup
Closed: Node setup for SI-S3 enabled.
–
51
Sequence Timer Disable
Closed: Drive ignores sequence timers and runs normally (based on b1-02/b1-16 source).
–
52
Sequence Timer Cancel
Closed: When the input changes from open to closed, the currently active sequence timer is
disabled. Operation will resume with the next scheduled sequence timer. Cycling the Run
command after the current sequence timer has been canceled will re-enable the sequence
timer.
–
60
DC Injection Braking command
Closed: Triggers DC Injection Braking.
–
61
External Speed Search
command 1
Closed: Activates Current Detection Speed Search from the maximum output frequency
(E1-04).
–
62
External Speed Search
command 2
Closed: Activates Current Detection Speed Search from the frequency reference.
–
63
Field weakening
Closed: The drive performs Field Weakening control as set for d6-01 and d6-02.
–
65
KEB Ride-Thru 1 (N.C.)
Open: KEB Ride-Thru 1 enabled.
–
66
KEB Ride-Thru 1 (N.O.)
Closed: KEB Ride-Thru 1 enabled.
–
67
Communications test mode
Tests the MEMOBUS/Modbus RS-422/RS-485 interface. Displays “PASS” if the test
completes successfully.
–
68
High Slip Braking (HSB)
Closed: Activates High Slip Braking to stop the drive during a Run command.
–
6A
Drive enable
Open: Drive disabled. If this input is opened during run, the drive will stop as specified by
b1-03.
Closed: Ready for operation.
–
75
Up 2 command
Used to control the bias added to the frequency reference by the Up/Down 2 function. The
Up 2 and Down 2 commands must always be used in conjunction with one another.
–
76
Down 2 command
Used to control the bias added to the frequency reference by the Up/Down 2 function. The
Up 2 and Down 2 commands must always be used in conjunction with one another.
–
7A
KEB Ride-Thru 2 (N.C.)
Open: KEB Ride-Thru 2 enabled. Drive disregards L2-29 and performs Single Drive KEB
Ride-Thru 2.
–
7B
KEB Ride-Thru 2 (N.O.)
Closed: KEB Ride-Thru 2 enabled. Drive disregards L2-29 and performs Single Drive KEB
Ride-Thru 2.
–
A8
Secondary PI Disable (N.O.)
Closed: Disables the secondary PI controller. Output behavior depends on the setting of
S3-12.
–
A9
Secondary PI Disable (N.C.)
Closed: Enables the secondary PI controller. Output behavior depends on the setting of S3-12
when open.
–
AA
Secondary PI Inverse Operation
Closed: Changes the sign of the secondary PI controller input (reverse acting PI control).
–
AB
Secondary PI Integral Reset
Closed: Resets the secondary PI controller integral value.
–
AC
Secondary PI Integral Hold
Closed: Locks the value of the secondary PI controller integral value.
–
AD
Select Secondary PI Parameters
Closed: Uses the secondary PI controller Proportional and Integral adjustments (S3-06 and
S3-07) instead of the primary PI controller Proportional and Integral adjustments (b5-02 and
b5-03). Only valid when S3-01 = 0 (secondary PI controller disabled).
Note:
This multi-function input has no effect on the secondary PI controller. It is only
used for the primary PI controller (b5-oo).
–
AF
Emergency Override Forward Run Closed: Run the drive forward using the speed set in S6-02.
–
B0
Emergency Override Reverse Run Closed: Run the drive in reverse using the speed set in S6-02.
–
B.6 H Parameters: Multi-Function Terminals
204
YASKAWA ELECTRIC TOEP YAIP1U 01B YASKAWA AC Drive - P1000 Quick Start Guide