L5: fault restart, L6: torque detection – Yaskawa CIMR-PUxA User Manual
Page 214
No.
(Addr.
Hex)
Name
Description
Values
Page
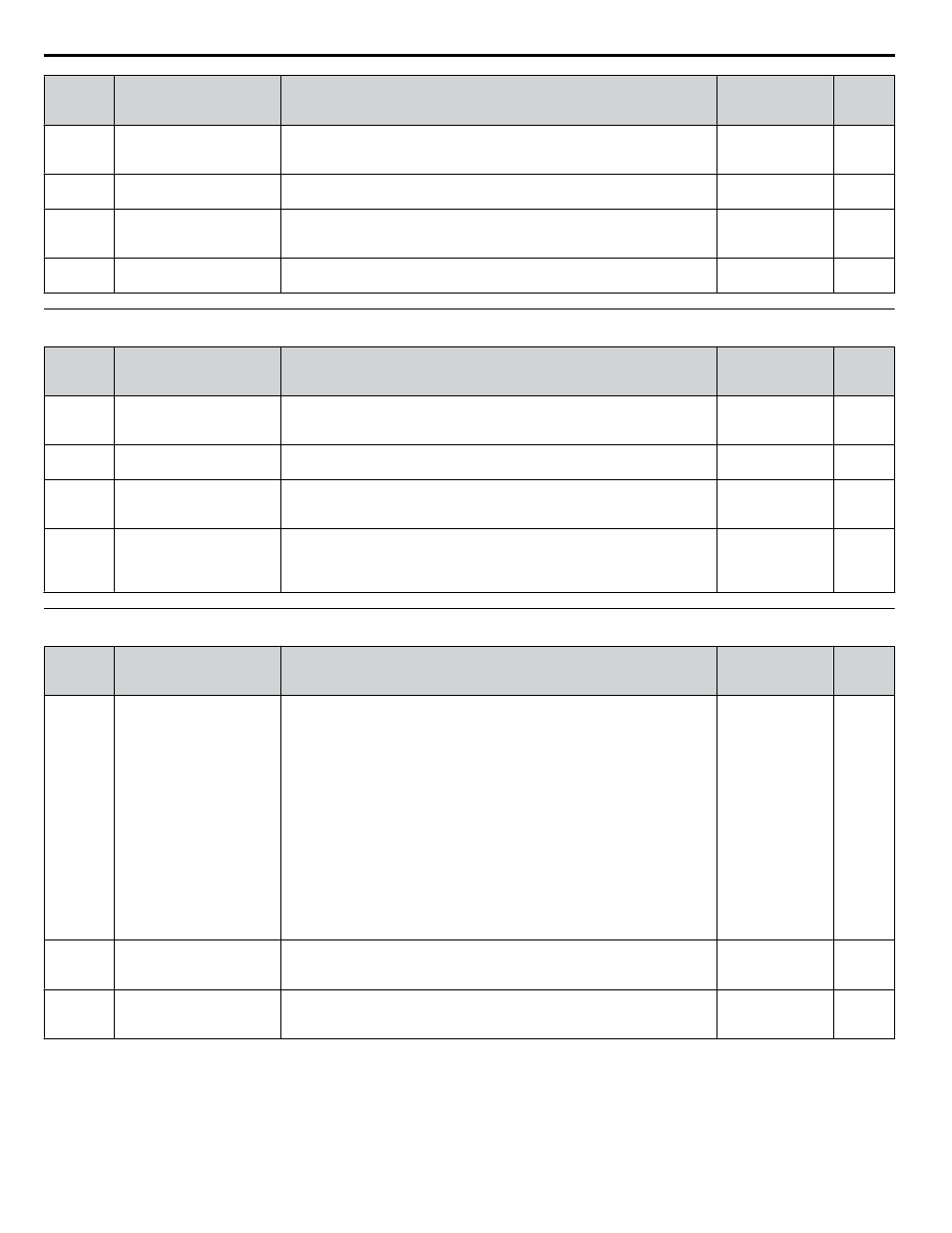
L4-04
(49C)
Speed Agreement Detection
Width (+/-)
L4-04 sets the hysteresis or allowable margin for speed detection.
Default: 2.0
Min.: 0.0
Max.: 20.0
–
L4-05
(49D)
Frequency Reference Loss
Detection Selection
0: Stop. Drive stops when the frequency reference is lost.
1: Run. Drive runs at a reduced speed when the frequency reference is lost.
Default: 0
Range: 0, 1
–
L4-06
(4C2)
Frequency Reference at
Reference Loss
Sets the percentage of the frequency reference that the drive should run with
when the frequency reference is lost.
Default: 80.0%
Min.: 0.0
Max.: 100.0
–
L4-07
(470)
Speed Agreement Detection
Selection
0: No detection during baseblock.
1: Detection always enabled.
Default: 0
Range: 0, 1
–
u
L5: Fault Restart
No.
(Addr.
Hex)
Name
Description
Values
Page
L5-01
(49E)
Number of Auto Restart
Attempts
Sets the number of times the drive may attempt to restart after the following
faults occur: GF, LF, oC, ov, PF, rH, rr, oL1, oL2, oL3, oL4, STo, Uv1.
Default: 0
Min.: 0
Max.: 10
–
L5-02
(49F)
Auto Restart Fault Output
Operation Selection
0: Fault output not active.
1: Fault output active during restart attempt.
Default: 0
Range: 0, 1
–
L5-04
(46C)
Fault Reset Interval Time
Sets the amount of time to wait between performing fault restarts.
Default: 10.0 s
Min.: 0.5
Max.: 600.0
–
L5-05
(467)
Fault Reset Operation
Selection
0: Continuously attempt to restart while incrementing restart counter only at
a successful restart (same as F7 and G7).
1: Attempt to restart with the interval time set in L5-04 and increment the
restart counter with each attempt (same as V7).
Default: 0
Range: 0, 1
–
u
L6: Torque Detection
No.
(Addr.
Hex)
Name
Description
Values
Page
L6-01
(4A1)
Torque Detection
Selection 1
0: Disabled
1: oL3 detection only active during speed agree, operation continues after
detection
2: oL3 detection always active during run, operation continues after detection
3: oL3 detection only active during speed agree, output shuts down on an oL3
fault
4: oL3 detection always active during run, output shuts down on an oL3 fault
5: UL3 detection only active during speed agree, operation continues after
detection
6: UL3 detection always active during run, operation continues after detection
7: UL3 detection only active during speed agree, output shuts down on an oL3
fault
8: UL3 detection always active during run, output shuts down on an oL3 fault
9: UL6 Alarm at Speed Agree
10: UL6 Alarm during Run
11: UL6 Fault at Speed Agree
12: UL6 Fault during Run
Default: 0
Range: 0 to 12
–
L6-02
(4A2)
Torque Detection
Level 1
Sets the overtorque and undertorque detection level.
Default: 15%
Min.: 0
Max.: 300
–
L6-03
(4A3)
Torque Detection
Time 1
Sets the time an overtorque or undertorque condition must exist to trigger
torque detection 1.
Default: 10.0 s
Min.: 0.0
Max.: 10.0
–
B.7 L: Protection Function
214
YASKAWA ELECTRIC TOEP YAIP1U 01B YASKAWA AC Drive - P1000 Quick Start Guide