L3: stall prevention – Yaskawa CIMR-PUxA User Manual
Page 212
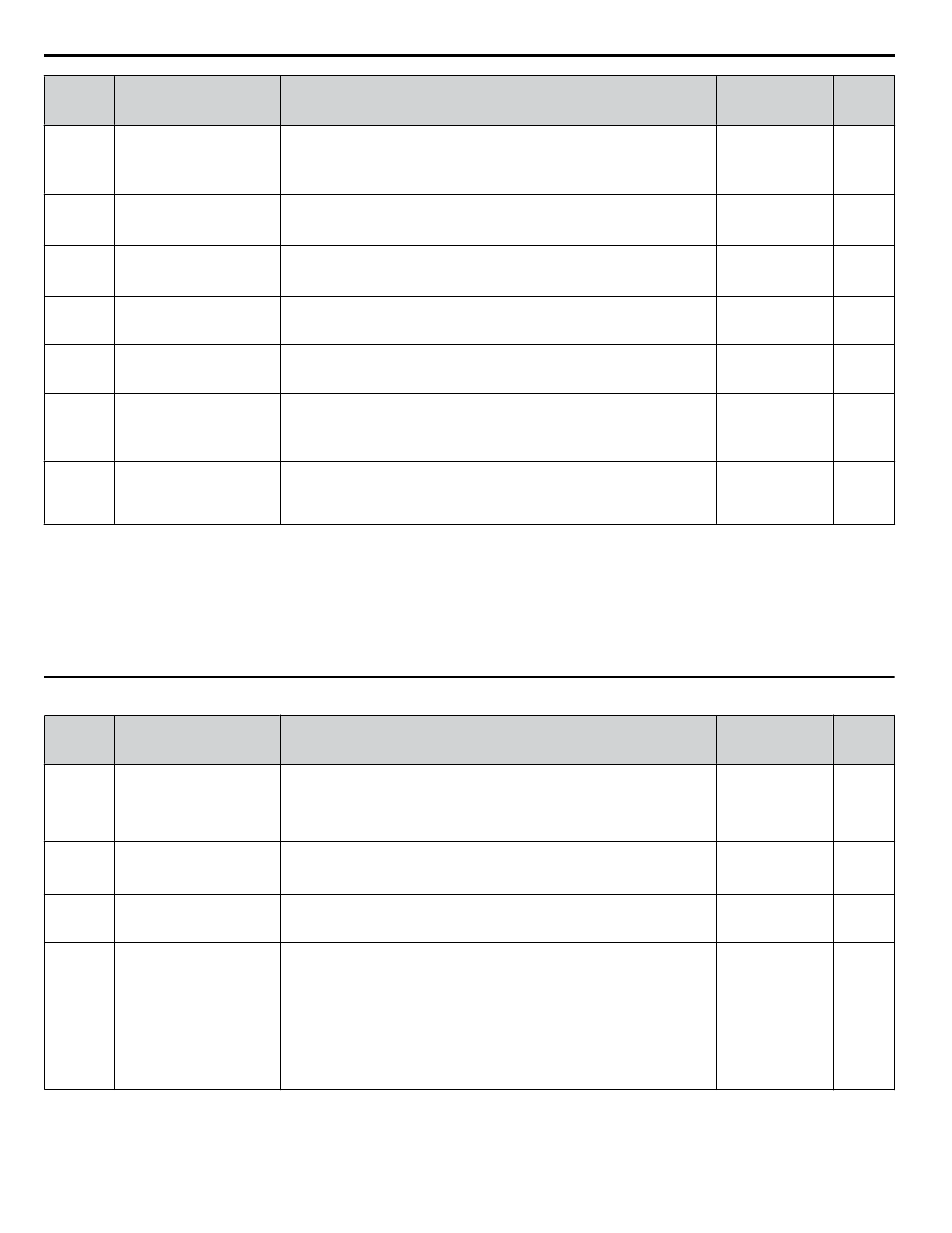
No.
(Addr.
Hex)
Name
Description
Values
Page
L2-05
(489)
Undervoltage Detection
Level (Uv1)
Sets the DC bus undervoltage trip level.
Default: 190 Vdc
<2> <3>
Min.: 150 Vdc
Max.: 210 Vdc
<3>
–
L2-06
(48A)
KEB Deceleration Time
Sets the time required to decelerate from the speed when KEB was activated
to zero speed.
Default: 0.00 s
Min.: 0.00
Max.: 6000.0
<4>
–
L2-07
(48B)
KEB Acceleration Time
Sets the time to accelerate to the frequency reference when momentary power
loss is over. If set to 0.0, the active acceleration time is used.
Default: 0.00 s
Min.: 0.00
Max.: 6000.0
<4>
–
L2-08
(48C)
Frequency Gain at KEB
Start
Sets the percentage of output frequency reduction at the beginning of
deceleration when the KEB Ride-Thru function is started.
Reduction = (slip frequency before KEB) × L2-08 × 2
Default: 100%
Min.: 0
Max.: 300
–
L2-10
(48E)
KEB Detection Time
(Minimum KEB Time)
Sets the time to perform KEB Ride-Thru.
Default: 50 ms
Min.: 0
Max.: 2000
–
L2-11
(461)
DC Bus Voltage Setpoint
during KEB
Sets the desired value of the DC bus voltage during KEB Ride-Thru.
Default:
<2>
[E1-01] × 1.22
Min.: 150 Vdc
Max.: 400 Vdc
<5>
–
L2-29
(475)
KEB Method Selection
0: Single Drive KEB Ride-Thru 1
1: Single Drive KEB Ride-Thru 2
2: System KEB Ride-Thru 1
3: System KEB Ride-Thru 2
Default: 0
Range: 0 to 3
–
<1> Default setting is dependent on parameter o2-04, Drive Model Selection.
<2> Default setting is dependent on parameter E1-01, Input voltage Setting.
<3> Values shown are specific to 200 V class drives. Double the value for 400 V class drives. Multiply the value by 2.875 for 600 V class drives.
<4> Setting range value is dependent on parameter C1-10, Accel/Decel Time Setting Units. When C1-10 = 0 (units of 0.01 seconds), the setting range
becomes 0.00 to 600.00 seconds.
<5> Values shown are specific to 200 V class drives. Double the value for 400 V class drives. Multiply the value by 2.875 for 600 V class drives, but
set the value below 1040 Vdc (overvoltage protection level).
u
L3: Stall Prevention
No.
(Addr.
Hex)
Name
Description
Values
Page
L3-01
(48F)
Stall Prevention Selection
during Acceleration
0: Disabled.
1: General purpose. Acceleration is paused as long as the current is above the
L3-02 setting.
2: Intelligent. Accelerate in the shortest possible time without exceeding the
L3-02 level.
Default: 1
Range: 0 to 2
L3-02
(490)
Stall Prevention Level
during Acceleration
Used when L3-01 = 1 or 2. 100% is equal to the drive rated current.
Default:
<1>
Min.: 0%
Max.: 150%
<1>
L3-03
(491)
Stall Prevention Limit
during Acceleration
Sets Stall Prevention lower limit during acceleration when operating in the
constant power range. Set as a percentage of drive rated current.
Default: 50%
Min.: 0
Max.: 100
L3-04
(492)
Stall Prevention Selection
during Deceleration
0: Disabled. Deceleration at the active deceleration rate. An ov fault may
occur.
1: General purpose. Deceleration is paused when the DC bus voltage exceeds
the Stall Prevention level.
2: Intelligent. Decelerate as fast as possible while avoiding ov faults.
3: Stall Prevention with braking resistor. Stall Prevention during deceleration
is enabled in coordination with dynamic braking.
4: Overexcitation Deceleration. Decelerates while increasing the motor flux.
5: Overexcitation Deceleration 2. Adjust the deceleration rate according to the
DC bus voltage.
Default: 1
Range: 0 to 5
B.7 L: Protection Function
212
YASKAWA ELECTRIC TOEP YAIP1U 01B YASKAWA AC Drive - P1000 Quick Start Guide