1 motor rotation direction – Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Analog Voltage and Pulse Train Reference User Manual
Page 348
9 Fully-closed Loop Control
9.3.1 Motor Rotation Direction
9-14
9.3.1 Motor Rotation Direction
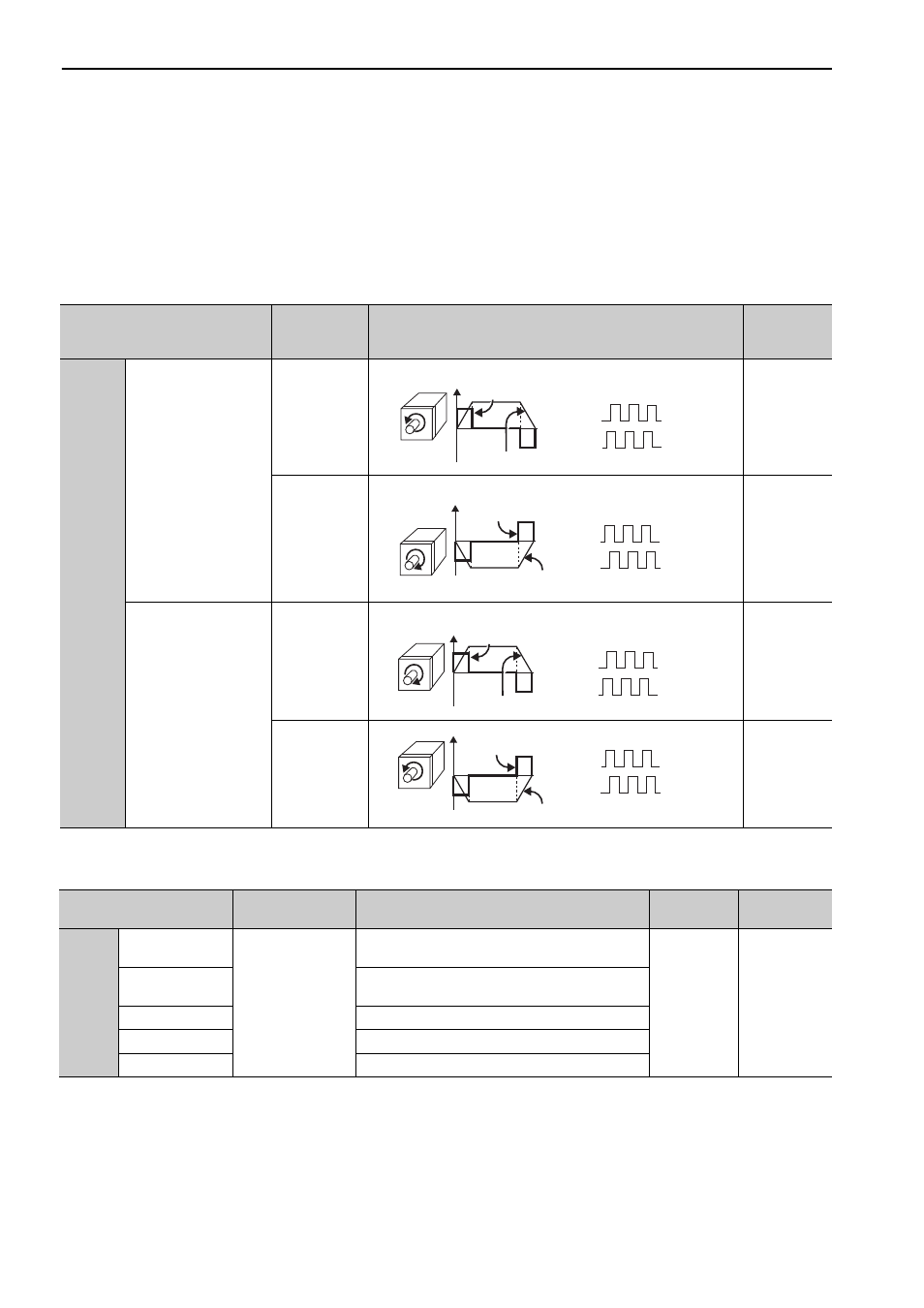
The motor rotation direction can be set. To perform fully-closed loop control, it is necessary to set the motor
rotation direction with both Pn000.0 (motor rotation direction) and Pn002.3 (external encoder usage).
(1) Setting Parameter Pn000.0
The standard setting for forward rotation is counterclockwise (CCW) as viewed from the load end of the ser-
vomotor.
Note: SigmaWin+ trace waveforms are shown in the above table.
(2) Setting Parameter Pn002.3
∗ The mode will be switched to semi-closed position control if Pn002 is set to n.0
.
Parameter
Forward/
Reverse
Reference
Direction of Motor Rotation and Encoder Output Pulse
Applicable
Overtravel
(OT)
Pn000
n.
0
Sets CCW as forward
direction.
[Factory setting]
Forward
Reference
P-OT
Reverse
Reference
N-OT
n.
1
Sets CW as forward
direction.
(Reverse Rotation
Mode)
Forward
Reference
P-OT
Reverse
Reference
N-OT
PAO
PBO
+
CCW
Phase B
advanced
Time
Encoder output pulse
Motor speed
Torque reference
Motor speed
PAO
PBO
+
CW
Phase A
advanced
Time
Encoder output pulse
Motor speed
Torque reference
Motor speed
PAO
PBO
+
CW
Phase B
advanced
Time
Encoder output pulse
Motor speed
Torque reference
Motor speed
PAO
PBO
+
CCW
Phase A
advanced
Encoder output pulse
Motor speed
Torque reference
Motor speed
Time
Parameter
Name
Meaning
When
Enabled
Classification
Pn002
n.0
[Factory setting]
External Encoder
Usage
Do not use external encoder.
*
After restart
Setup
n.1
Uses external encoder in standard rotation direc-
tion.
n.2
Reserved (Do not set.)
n.3
Uses external encoder in reverse rotation direction.
n.4
Reserved (Do not set.)