With overrun of the target position – BECKHOFF EL7037 User Manual
Page 154
Commissioning
With overrun of the target position
Time
POS Outputs
POS Inputs
Description
t1:
Execute = 1
Target position = 200000
Velocity = 5000
Start type = 0x0001
Acceleration = 3000
Deceleration = 5000
Busy = 1
Accelerate = 1
- Specification of the 1
st
parameter
- Start of the 1
st
acceleration phase
t2:
Accelerate = 0
- End of the 1
st
acceleration phase
t3:
Target position = 100000
Velocity = 1500
Start type = 0x1001
Acceleration = 1000
Deceleration = 2000
Warning = 1
Decelerate = 1
- Change of the parameters
- Activation by new start types
- Warning of overrunning the target
position
- Start of the 1
st
deceleration phase
t4:
Accelerate = 1
Decelerate = 0
- End of the 1
st
deceleration phase
- Start of the 2
nd
acceleration phase in the
opposite direction
t5:
Accelerate = 0
Decelerate = 1
- End of the 2
nd
acceleration phase
- Start of the 2
nd
deceleration phase
t6:
Execute = 0
Busy = 0
In-Target = 1
Decelerate = 0
- End of the 2
nd
deceleration phase
- Motor is at the new target position
t7 - t10:
- Absolute travel back to the start position
0
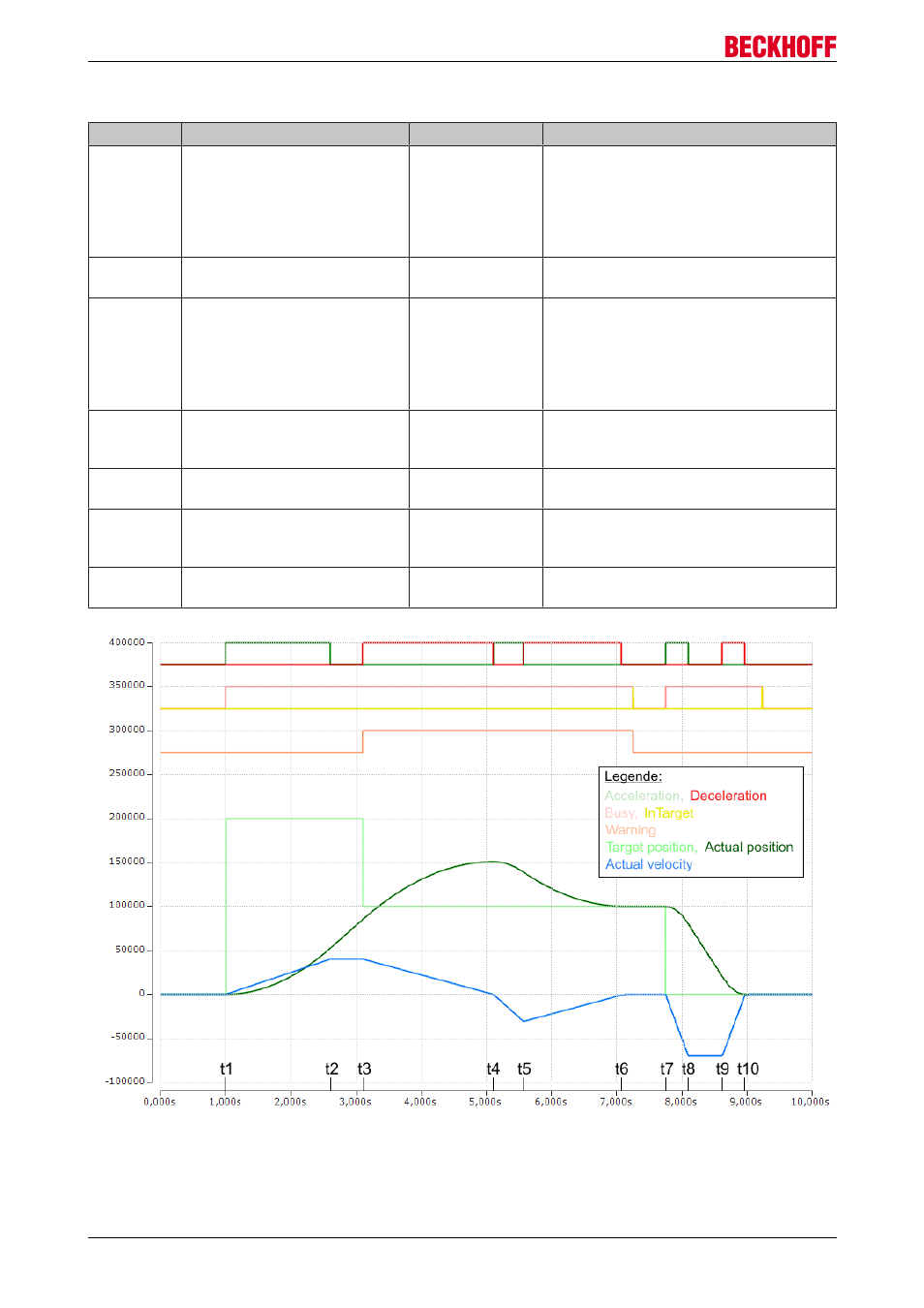
Fig. 175: Scope recording of a travel command with a dynamic change of the target position, with overrun-
ning of the final target position
(The axis scaling refers only to the positions, not to the speed or the status bits)
EL70x7
154
Version 1.0