Parameters a - 4, Sequence, Dc braking – Yaskawa P7B Drive Bypass User Manual
Page 222: Table 1: parameter list (continued)
Parameters A - 4
Sequence
b1-01
Frequency Reference
Selection
Reference Source
Selects the speed command (frequency reference) input source.
0: Operator - Digital preset speed d1-01
1: Terminals - Analog Input Terminal A1 (or Terminal A2 see
parameter H3-13)
2: Serial Com - RS-485 terminals R+, R-, S+ and S-
3: Option PCB - Option board connected at 2CN
0 to 3
1
Quick Setting
b1-02
Run Command Selection
Run Source
Selects the run command input source.
0: Operator - "Hand" and "Off" keys on digital operator
1: Terminals - Contact Closure on Terminal S1
2: Serial Com - RS-485 terminals R+, R-, S+ and S-
3: Option PCB - Option board connected at 2CN
0 to 3
1
Quick Setting
b1-03
Stopping Method Selection
Stopping Method
Selects the stopping method when the run command is removed.
0: Ramp to Stop
1: Coast to Stop
2: DC Injection to Stop
3: Coast w/Timer (A new run command is ignored if input before
the time in C1-02 expires.)
0 to 3
0
Quick Setting
b1-04
Reverse Operation Selection
Reverse Oper
Determines the forward rotation of the motor, and if reverse opera-
tion is disabled.
0: Reverse Enabled
1: Reverse Disabled
2: Exchange Phase - Change direction of forward motor rotation.
3: ExchgPhs, Rev Dsbl - Change direction of forward motor
rotation and disable reverse operation.
0 to 3
1
Quick Setting
b1-07
Local/Remote Run Selection
LOC/REM RUN Sel
0: Cycle Extern RUN - If the run command is closed when
switching from hand(local) mode to auto(remote) mode, the
Drive will not run.
1: Accept Extrn RUN - If the run command is closed when
switching from hand(local) mode to auto(remote) mode, the
Drive WILL run.
0 or 1
0
Programming
b1-08
Run Command Selection
During Program
RUN CMD at PRG
0: Disabled - Run command accepted only in the operation menu.
1: Enabled - Run command accepted in all menus
(except when b1-02 = 0).
0 or 1
0
Programming
b1-11
Drive Delay Time Setting
Wait to Run Time
After a run command, Drive output will start after this delay time.
0 to 600
0sec
Programming
b1-12
Hand Frequency Reference
Selection
HAND Fref Source
Selects the speed command input source in hand mode.
0: Operator - Digital preset speed d1-01
1: Terminals - Analog Input Terminal A1 (or Terminal A2 see
parameter H3-13)
0 or 1
0
Programming
DC Braking
b2-01
DC Injection Braking Start
Frequency
DCInj Start Freq
Sets the frequency at which DC injection braking starts when ramp
to stop (b1-03 = 0) is selected. If b2-01< E1-09, DC Injection
braking starts at E1-09.
0.0 to 10.0
0.5Hz
Programming
b2-02
DC Injection Braking
Current
DCInj Current
Selects the DC injection braking current as a percentage of the
Drive rated current.
0 to 100
50%
Programming
b2-03
DC Injection Braking Time at
Start
DCInj Time @ Start
Sets the time length of DC injection braking at start in units of 1
second.
0.00 to
10.00
0.00sec
Programming
b2-04
DC Injection Braking Time at
Stop
DCInj Time @ Stop
When b1-03 = 2 actual DC Injection time is calculated as follows:
b2-04 * 10 * Output Frequency / E1-04. When b1-03 = 0, this
parameter determines the amount of time DC Injection is applied to
the motor at the end of the decel ramp. This should be set to a min-
imum of 0.50 seconds when using HSB. This will activate DC
injection during the final portion of HSB and help ensure that the
motor stops completely.
0.00 to
10.00
0.00sec
Programming
b2-09
Motor Pre-Heat Current
Preheat Current
Motor Pre-heat current in % of Drive rated current. This is used to
keep the motor warm to prevent condensation and is used in
conjunction with a digital input (data = 60).
0 to100
0%
Programming
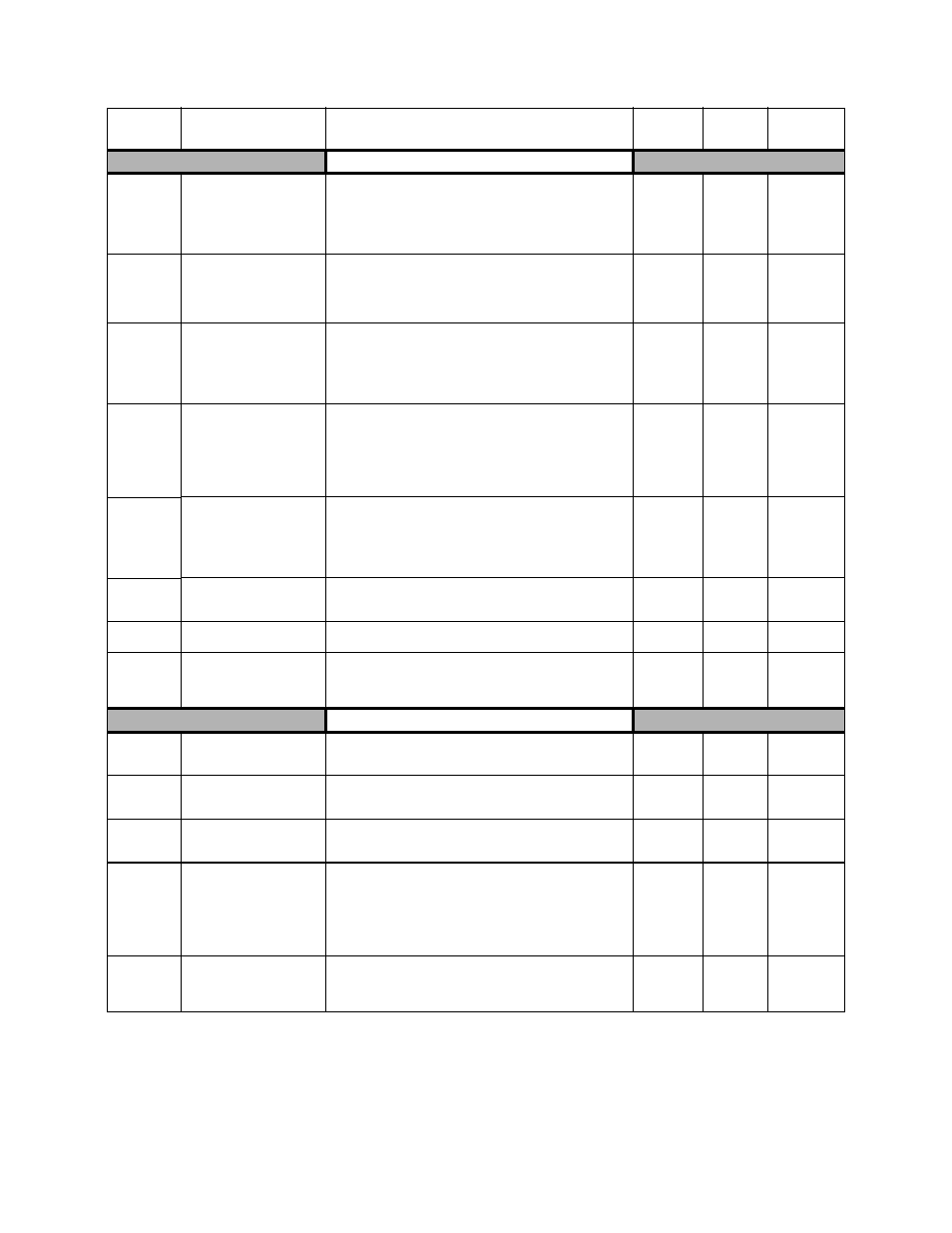
Table 1: Parameter List (Continued)
Parameter
No.
Parameter Name
Digital Operator Display
Description
Setting
Range
Factory
Setting
Menu
Location