Integer type lau instruction – Yaskawa MP900 Series Machine Controller New Ladder Editor User Manual
Page 162
1 Ladder Program Instructions
1.7.11 LINEAR ACCELERATOR/DECELERATOR 1 Instruction (LAU)
1-152
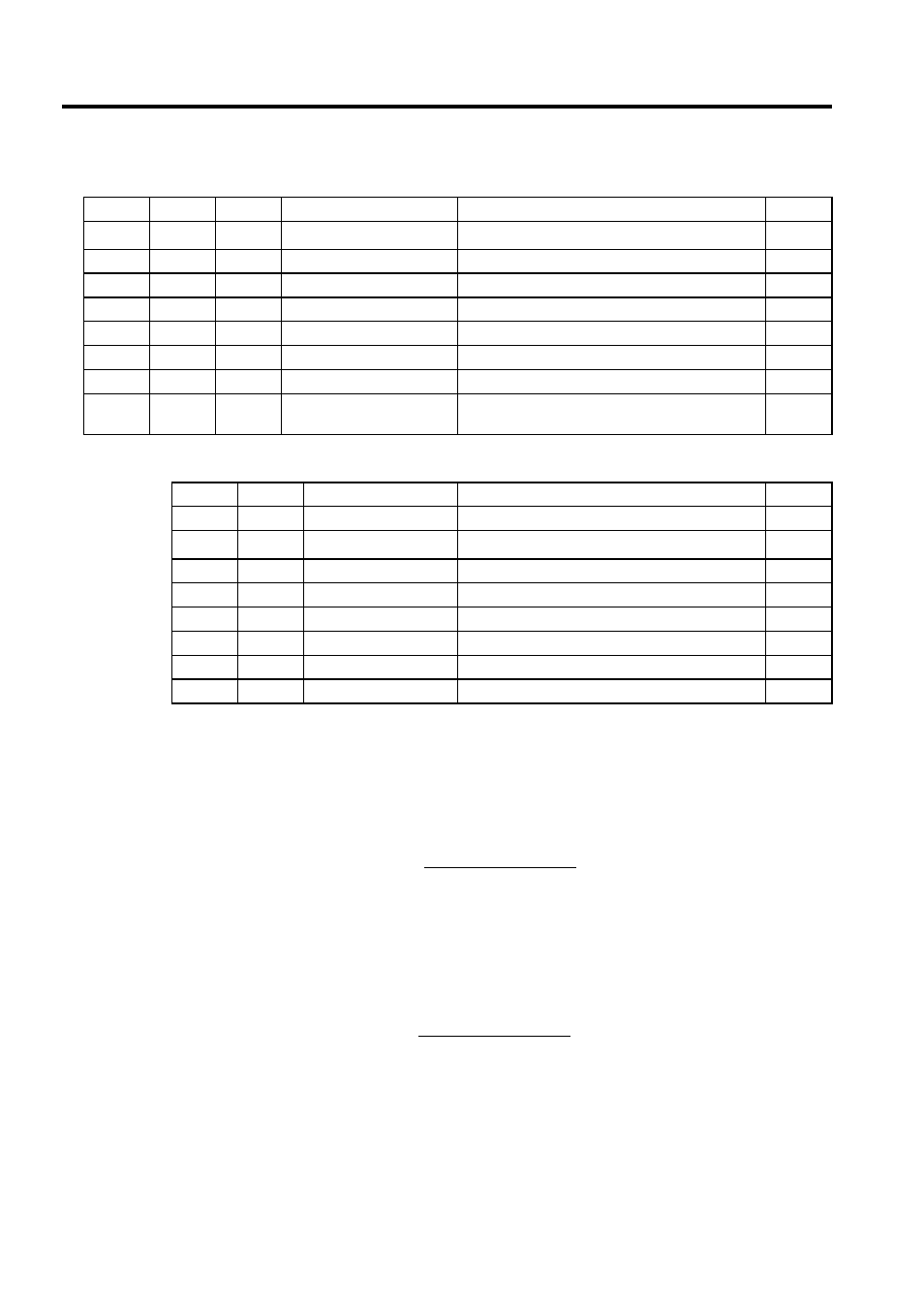
* Relay I/O Bit Assignment
* When the quick stop (QS) is “OFF” , the quick stop time (QT) is used as
acceleration/deceleration time.
The following operations are performed inside integer type LAU instructions.
Integer Type LAU Instruction
Table 1.27 Real Type LAU Instruction Parameters
ADR
Type
Symbol
Name
Specifications
I/O
0
W
RLY
Relay I/O
Relay input, relay output
∗
IN/OUT
1
W
−
(Reserved)
Reserved register
−
2
F
LV
100% input level
Scale of the 100% input value
IN
4
F
AT
Acceleration time
Time for acceleration from 0% to 100% (s)
IN
6
F
BT
Deceleration time
Time for deceleration from 0% to 100% (s)
IN
8
F
QT
Quick stop time
Time for quick stop from 100% to 0% (s)
IN
10
F
V
Current speed
LAU output (also output to the F register)
OUT
12
F
DVDT
Current acceleration/de-
celeration speed
Scaled with the normal acceleration rate being set to
5000.
OUT
BIT
Symbol
Name
Specifications
I/O
0
RN
Line is running
"ON" is input while the line is running.
IN
1
QS
Quick stop
"OFF" is input upon quick stop.
∗
IN
2 to 7
−
(Reserved)
Reserved relay for input
IN
8
ARY
In acceleration
"ON" is output during acceleration.
OUT
9
BRY
In deceleration
"ON" is output during deceleration.
OUT
A
LSP
Zero speed
"ON" is output upon attainment of a speed of 0.
OUT
B
EQU
Coincidence
"ON" is output when input value
= output value.
OUT
C to F
−
(Reserved)
Reserved relay for input
OUT
LV
× Ts (0.1 ms) + REM
When VI > V (V
0),
Acceleration rate (ADV)
=
AT (0.1 s) × 1000
V
= V + ADV: In acceleration (ARY)
ON
When VI < V (V
0),
V
= V - ADV: In acceleration (ARY)
ON
≥
≤
,
,
,
,
,
,
LV
× Ts (0.1 ms) + REM When VI > V (V < 0)
Deceleration rate (BDV)
=
BT (0.1 s)
× 1000 V
= V + BDV:
In
deceleration
(BRY)
ON
When VI < V
(V > 0)
V = V - BDV: In deceleration (BRY)
ON
,
,
,
,
,
,