4 setting the overtravel signals, 5 setting the force limits, Related parameter – Yaskawa Sigma-5 User Manual: Setup for Linear Motors User Manual
Page 147
5.3 Setting the SERVOPACK Parameters
5-11
5
T
rial Operation (Checking Linear Servomotor Operation)
Related Parameter
5.3.4 Setting the Overtravel Signals
Polarity detection cannot start in overtravel state.
When using the overtravel function, connect the signal wires and use in base block
status. When not using the overtravel function, set the parameters Pn50A.3 to 8 (For-
ward run allowed) and Pn50B.0 to 8 (Reverse run allowed). The setting validation is
required to enable the settings.
5.3.5 Setting the Force Limits
To prevent danger during setup of the linear servomotor, the factory settings for the
forward force limit (Pn483) and reverse force limit (Pn484) parameters are set to a
small value (factory setting: 30%).
If the force limits are set after the steps described in 5.3.1 Setting and Checking the
Linear Scale Pitch and 5.3.2 Hall Sensor Selection, overrun will not occur. Increase
the value in the parameters up to the required force. Set the value to the maximum
value if no particular restricting conditions apply.
Note: If the force limit is set too high, polarity detection may not operate normally
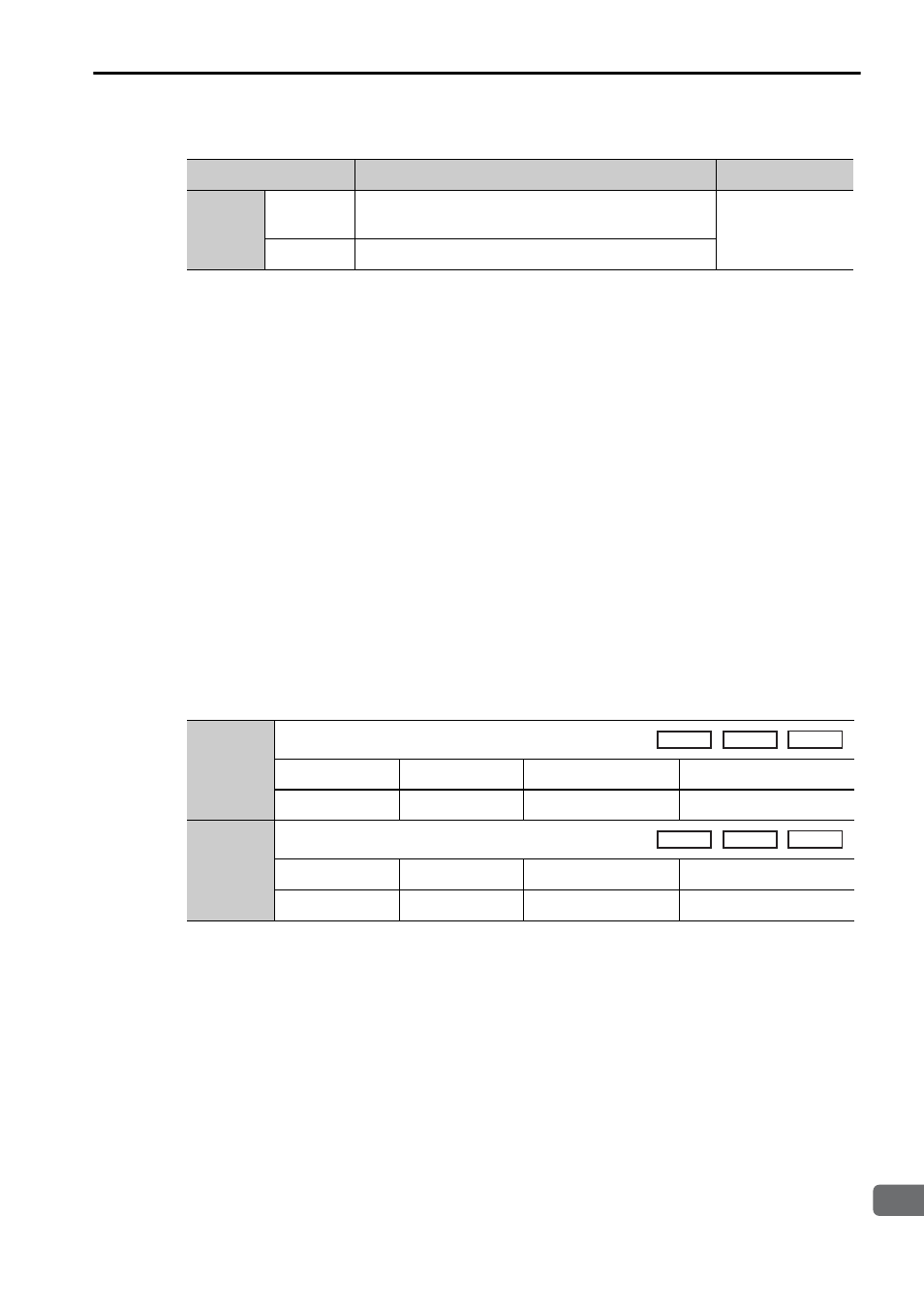
Parameter
Meaning
When Enabled
Pn080
n.0 Sets phase A lead as phase sequence of U, V, W
(factory setting)
After restart
n.1 Sets phase B lead as phase sequence of U, V, W
Pn483
Forward Force Limit
Setting Range
Setting Unit
Factory Setting
When enabled
0 to 800
1%
30
Immediately
Pn484
Reverse Force Limit
Setting Range
Setting Unit
Factory Setting
When enabled
0 to 800%
1%
30
Immediately
Speed
Position
Force
Speed
Position
Force