Yaskawa Sigma-5 User Manual: Setup for Linear Motors User Manual
Page 158
5 Trial Operation (Checking Linear Servomotor Operation)
5.5.3 Troubleshooting for Polarity Detection Errors
5-22
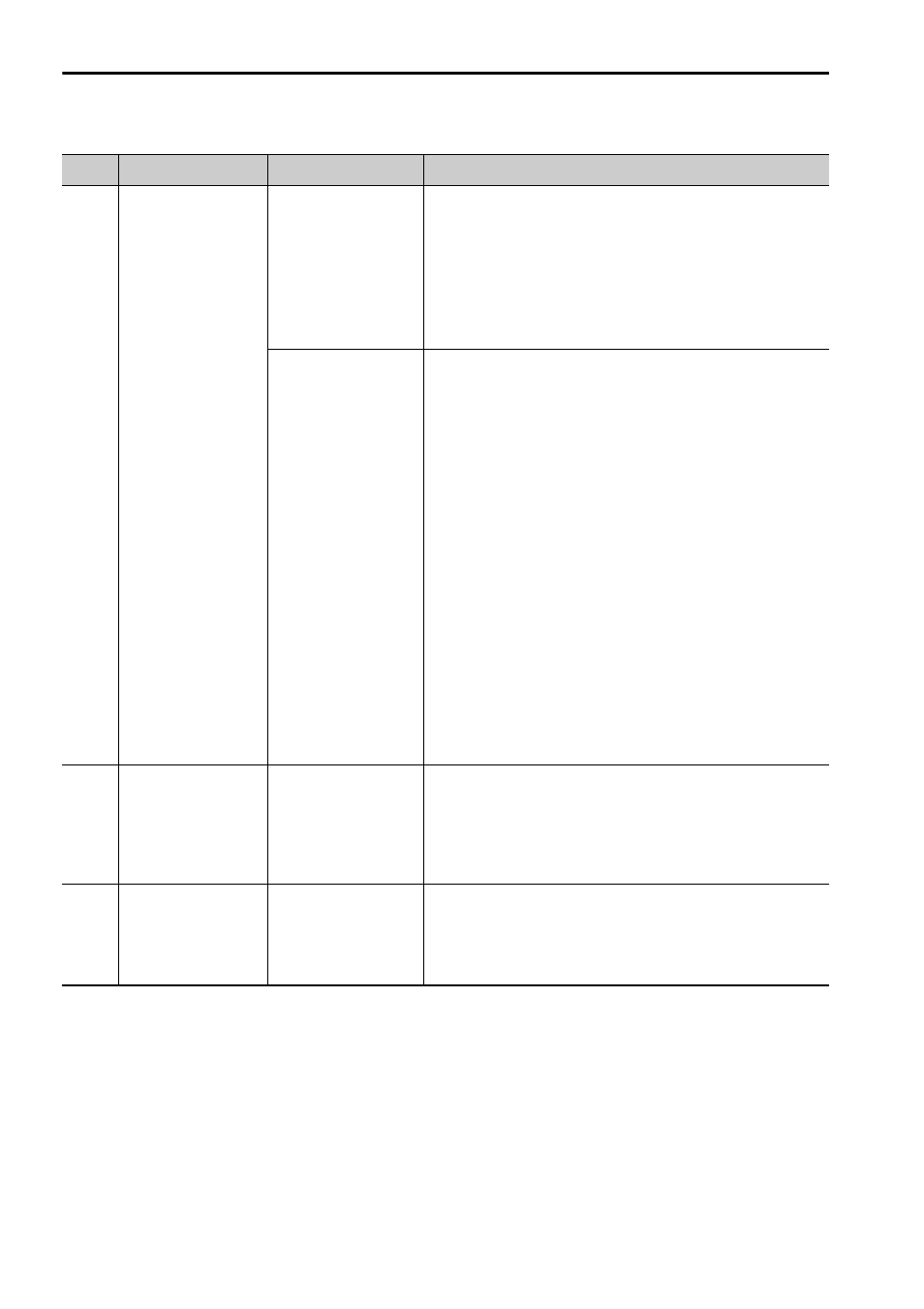
3
Polarity detection
uncompleted
(A.C52)
<Analog Pulse
Model>
• The /PDET
signal was not
input.
• Polarity
detection was not
yet complete.
Input the /PDET signal.
<M-II Model/M-III
Model/Command
Option Attachable
Type>
The servo has
been turned ON
under the
following
circumstances.
• An absolute
linear scale is
being used.
• The polarity
detection
selection for the
absolute linear
scale was set to
not execute.
(Pn587.0=0)
• Polarity
detection was not
yet complete.
If you are using an absolute linear scale, do one of the
following.
• Execute polarity detection (Fn080)
• Set Pn587.0 to 1 to execute polarity detection for an
absolute linear scale.
4
Out of range for
polarity detection
(A.C53)
The movement
distance during
detection exceeds
the range set for
Pn48E.
An alarm occurs when the motor movement distance
during detection becomes out of the range set for
Pn48E. If the command distance has not been changed
from the factory set value, the motor might have been
moved for some reason. Check for the cause and take a
proper measure.
5
Polarity detection
error 2 (A.C54)
An external force
was applied to the
linear servomotor.
Increase the value of the polarity detection confirmation
force reference (Pn495).
Increase the value of the polarity detection allowable
error range (Pn498). (Note that increasing the allowable
error will also increase the servomotor temperature.)
(cont’d)
No.
Problem
Cause
Correction