5 polarity detection – Yaskawa Sigma-5 User Manual: Setup for Linear Motors User Manual
Page 151
5.5 Polarity Detection
5-15
5
T
rial Operation (Checking Linear Servomotor Operation)
5.5
Polarity Detection
When using a linear servomotor without hall sensor, execute the polarity detection.
Make sure that the following conditions are satisfied when executing the polarity
detection.
• There will be no danger around the linear servomotor when the linear servomo-
tor moves approximately 10 mm.
(The linear servomotor may move approximately 5 cm in the case the polarity
detection fails. The distance the linear servomotor moves in such case may differ
depending on many factors.)
• The scale pitch is within 100
μm. (within 40 μm is recommended when using an
incremental linear scale.)
• Minimum unequal external force on the linear servomotor (5% of the rated force
maximum is recommended.)
• The mass ratio is 50 times greater or less.
• On a horizontal axis.
• Friction on the guide is a few percentages of the rated force (air slide not used).
1. The linear servomotor is turned ON during polarity detection, so
take measures to avoid electric shock. The linear servomotor will
make large movements during detection, so take the machine’s
range of motion into consideration and do not stand near the any
moving parts.
2. Polarity detection depends on many factors, such as mass ratio,
friction, and cable tension. If any error occurs because of one of
these factors, polarity detection may failed.
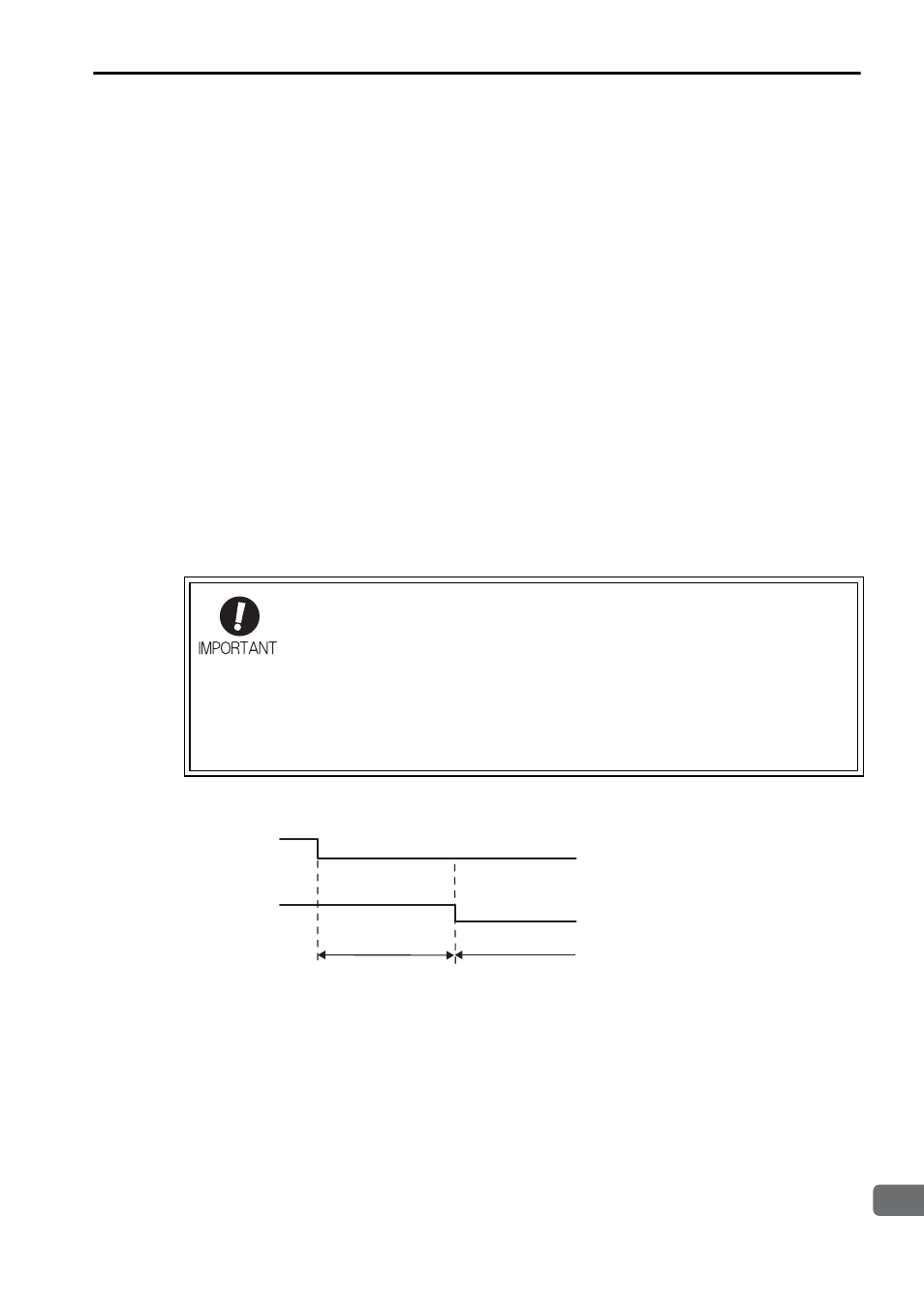
Polarity detection
→Status display: P-dt
Polarity detection completed
→Normal operation possible
/S-ON input
(/P-DET)
/S-RDY output