2) overtravel function setting – Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Mechatrolink-II Communication Reference User Manual
Page 103
4.3 Basic Functions Settings
4-7
4
Ope
rat
ion
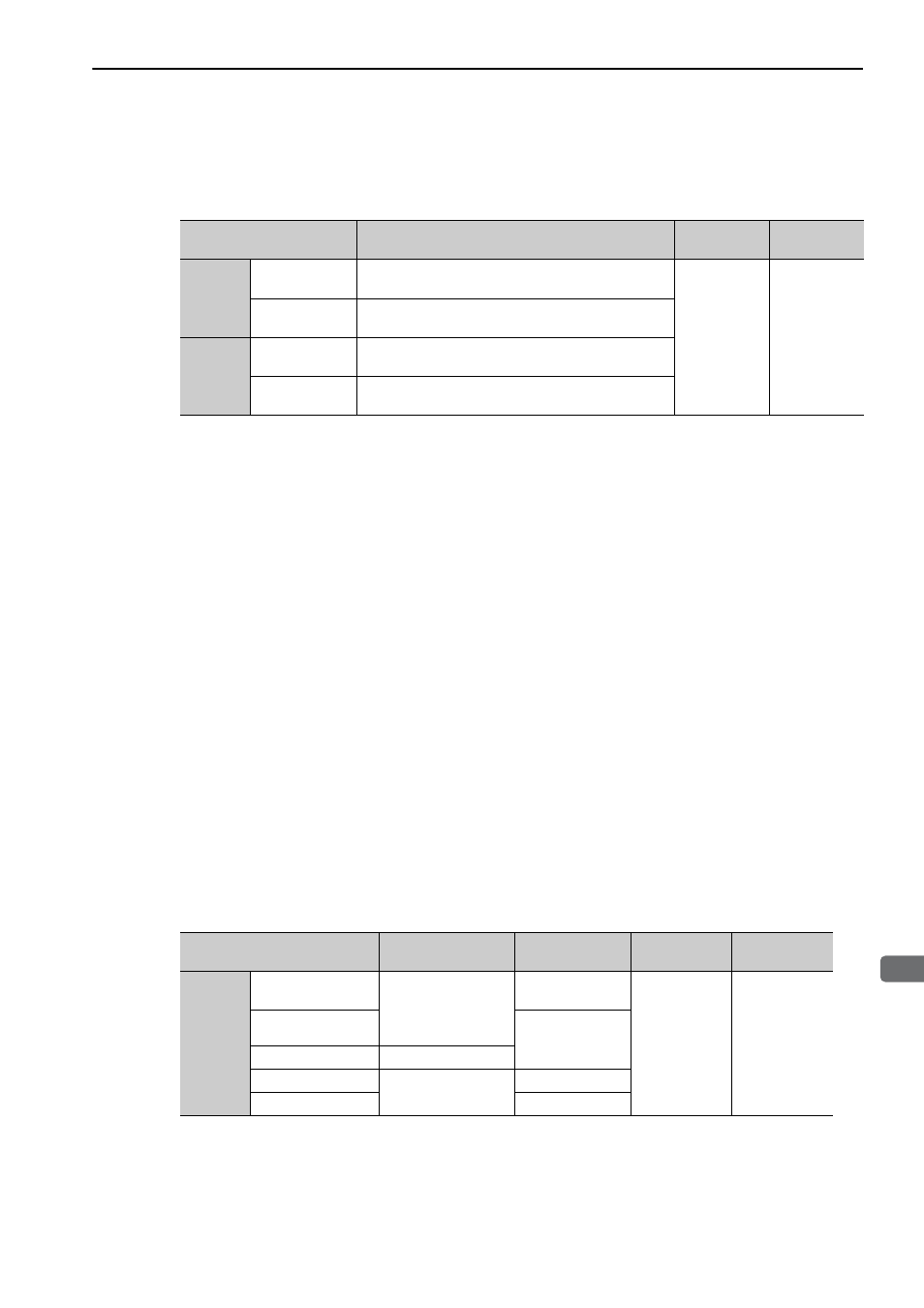
(2) Overtravel Function Setting
Parameters Pn50A and Pn50B can be set to enable or disable the overtravel function.
If the overtravel function is not used, no wiring for overtravel input signals will be required.
A parameter can be used to re-allocate input connector number for the P-OT and N-OT signals. Refer to 3.4.1
Input Signal Allocations for details.
Note: The factory settings of these parameters in a large-capacity
Σ-V SERVOPACK are not all the same as those for a
standard
Σ-V SERVOPACK.
Make sure that you consider any differences in the factory settings if you copy the parameters from a standard
Σ-V
SERVOPACK to a large-capacity
Σ-V SERVOPACK.
(3) Servomotor Stopping Method When Overtravel is Used
There are three servomotor stopping methods when an overtravel is used.
• Dynamic brake
By short-circuiting the electric circuits, the servomotor comes to a quick stop.
• Decelerate to a stop
Stops by using emergency stop torque.
• Coast to a stop
Stops naturally, with no control, by using the friction resistance of the servomotor in operation.
After servomotor stopping, there are two modes.
• Coast mode
Stopped naturally, with no control, by using the friction resistance of the servomotor in operation.
• Zero clamp mode
A mode forms a position loop by using the position reference zero.
The servomotor stopping method when an overtravel (P-OT, N-OT) signal is input while the servomotor is
operating can be set with parameter Pn001.
∗ Always connect a dynamic brake circuit for these settings.
• A servomotor under torque control cannot be decelerated to a stop. The servomotor is stopped with the
dynamic braking (DB) or coasts to a stop according to the setting of Pn001.0. After the servomotor stops,
the servomotor will enter a coast state.
• For details on servomotor stopping methods after the SV_OFF command is received or an alarm occurs,
refer to 4.3.5 Stopping Servomotors after SV_OFF Command or Alarm Occurrence.
Parameter
Meaning
When
Enabled
Classification
Pn50A
n.2
[Factory setting]
Inputs the Forward Run Prohibited (P-OT) signal from
CN1-42.
After restart
Setup
n.8
Disables the Forward Run Prohibited (P-OT) signal.
Allows constant forward rotation.
Pn50B
n.
3
[Factory setting]
Inputs the Reverse Run Prohibited (N-OT) signal from
CN1-43.
n.
8
Disables the Reverse Run Prohibited (N-OT) signal.
Allows constant reverse rotation.
Parameter
Stop Method
Mode After
Stopping
When Enabled Classification
Pn001
n.
00
[Factory setting]
DB
DB
After restart
Setup
n.
01
*
Coast
n.
02
Coast
n.
1
Deceleration to a stop
Zero clamp
n.
2
Coast