4 confirming safety functions, 5 connecting a safety function device, 3) procedure – Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Mechatrolink-II Communication Reference User Manual
Page 165: M-ii
4.9 Safety Function
4-69
4
Ope
rat
ion
(3) Procedure
4.9.4 Confirming Safety Functions
When starting the equipment or replacing the SERVOPACK or converter for maintenance, be sure to conduct
the following confirmation test on the HWBB function after wiring.
• When the /HWBB1 and /HWBB2 signals turn OFF, check that the digital operator displays "Hbb" and that
the servomotor does not operate.
• Check the ON/OFF states of the /HWBB1 and /HWBB2 signals with Un015.
→ If the ON/OFF states of the signals do not coincide with the display, an error in the external device, dis-
connection or short-circuiting of the external wiring, or a failure in the SERVOPACK or converter must be
considered. Find the cause and correct the problem.
• Check with the display of the feedback circuit input of the connected device to confirm that the EDM1 sig-
nal is OFF while in normal operation.
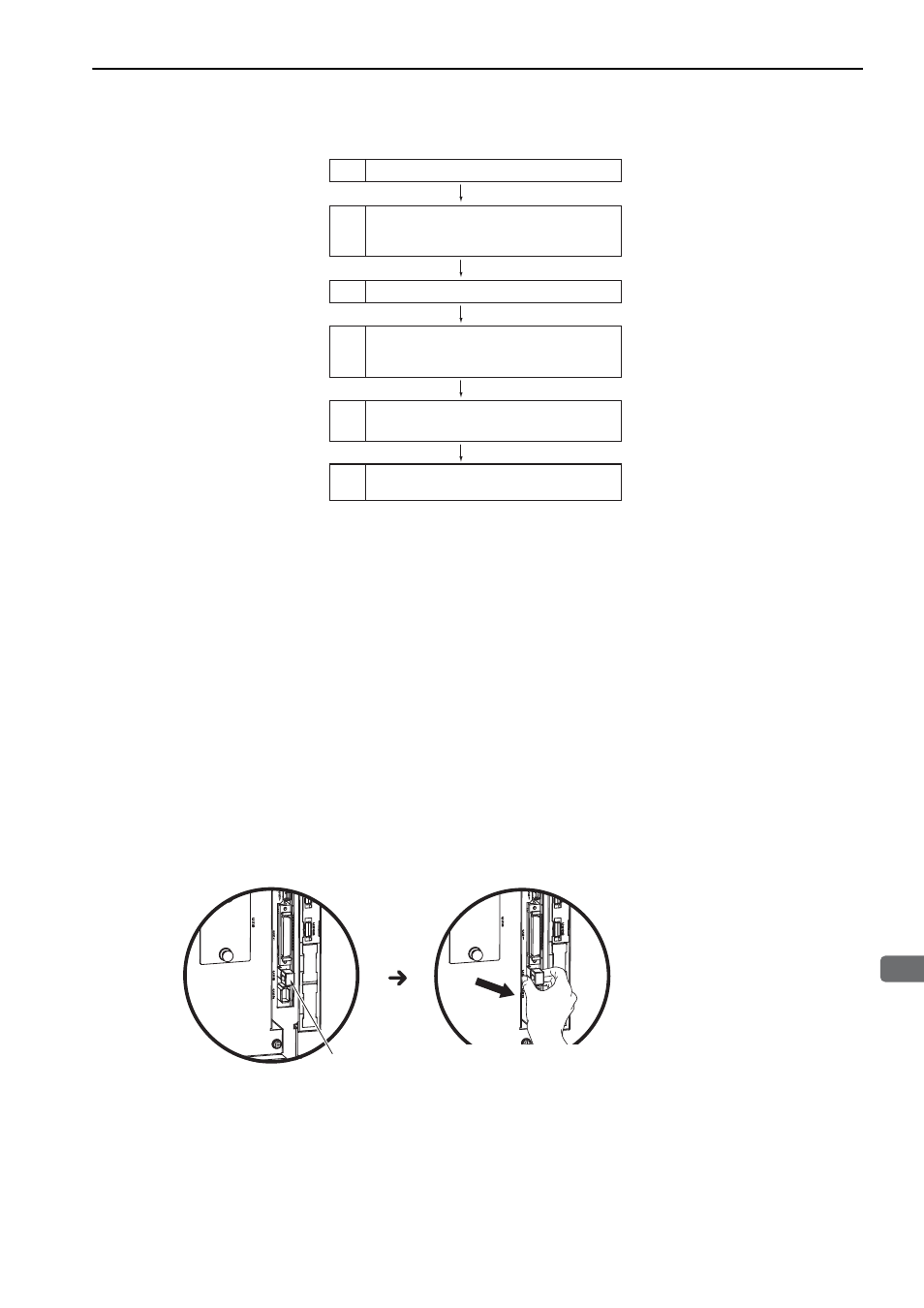
4.9.5 Connecting a Safety Function Device
Connect a safety function device using the following procedure.
1.
Remove the safety function’s jumper connector from CN8.
2.
Connect a safety function device to CN8.
Note: When not using the safety function, use the SERVOPACK with the safety function’s jumper connector (JZSP-
CVH05-E provided as an accessory) inserted in CN8. If the SERVOPACK is used without the jumper connector
inserted into CN8, no current will flow to the servomotor and no torque will be output. In this case, "Hbb" will be
displayed on the digital operator.
1
2
3
4
6
Request to open the guard.
Open the guard and enter.
The /HWBB1 and /HWBB2 signals are
OFF and HWBB function operates.
(The operation in the guard is available.)
5
After completing the operation, leave and
close the guard.
When the servomotor is operating, the host
controller stops the servomotor and sends
the servo OFF command (SV_OFF).
The host controller sends the servo ON com-
mand (SV_ON).
Safety function’s
jumper connector
Hold the jumper connector with
two fingers and pull it out.
M-II