Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Mechatrolink-II Communication Reference User Manual
Page 358
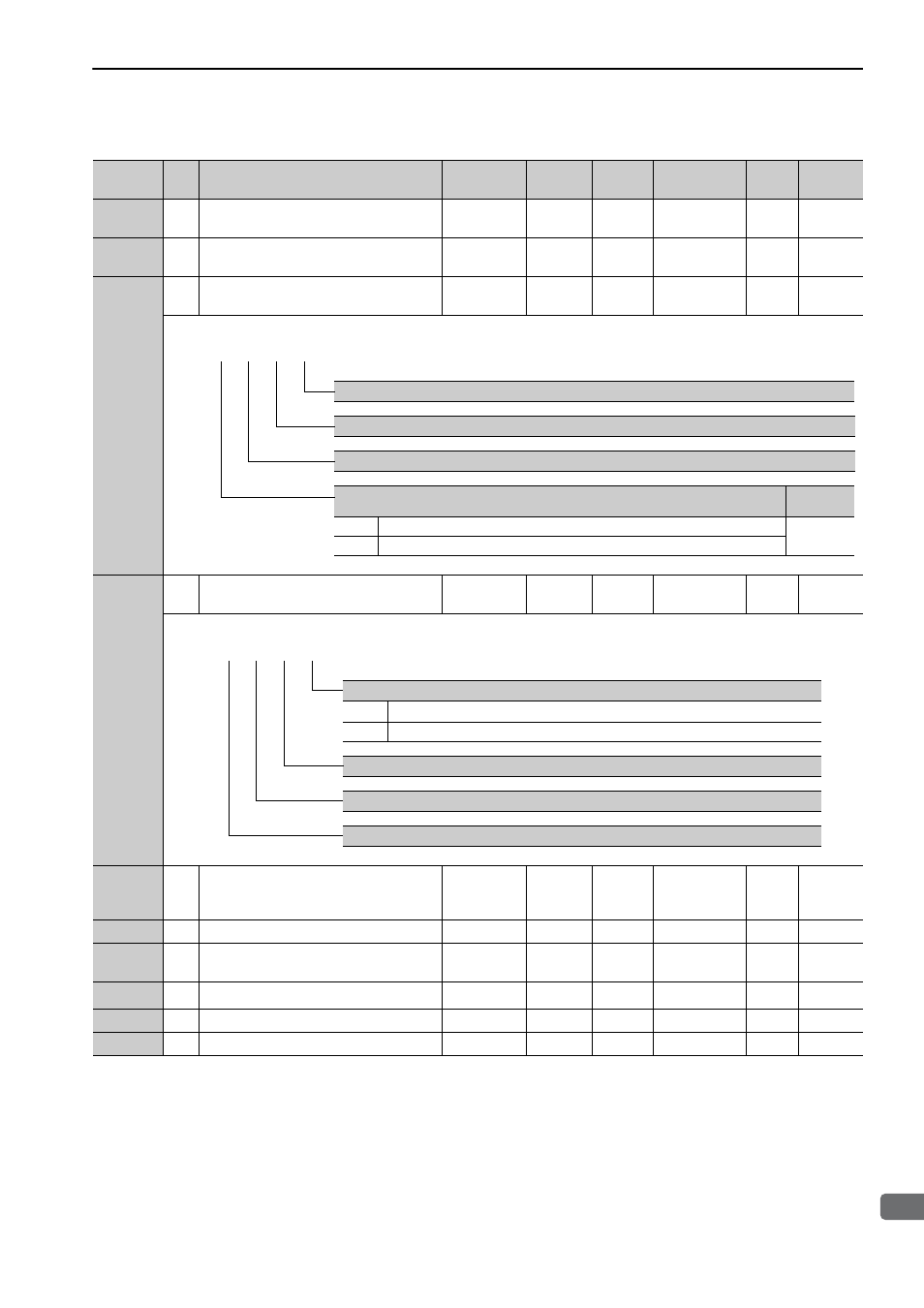
10.1 List of Parameters
10-13
10
Ap
pend
ix
Pn210
4
Electronic Gear Ratio (Denominator)
1 to
1073741824
1
1
After restart
Setup
4.4.3
Pn212
4
Encoder Output Pulses
16 to
1073741824
1 P/rev
2048
After restart
Setup
4.4.5
Pn22A
2
Fully-closed Control
Selection Switch
0000 to 1003
−
0000
After restart
Setup
−
Pn230
2
Position Control Expanded Function
Switch
0000 to 0001
–
0000
After reset
Setup
5.8.6
Pn231
4
Backlash Compensation Value
-500000 to
500000
0.1
reference
unit
0
Immediately
Setup
5.8.6
Pn233
2
Backlash Compensation Time Constant
0 to 65536
0.01 ms
0
Immediately
Setup
5.8.6
Pn281
2
Encoder Output Resolution
1 to 4096
1 edge/
pitch
20
After restart
Setup
8.3.3
Pn304
2
JOG Speed
0 to 10000
1 min
-1
500
Immediately
Setup
6.3
Pn305
2
Soft Start Acceleration Time
0 to 10000
1 ms
0
Immediately
Setup
*1
Pn306
2
Soft Start Deceleration Time
0 to 10000
1 ms
0
Immediately
Setup
*1
∗1. For details, refer to
Σ
-V Series User’s Manual MECHATROLINK-II Commands (No.: SIEP S800000 54).
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classi-
fication
Reference
Section
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
Speed Feedback Selection at Fully-closed Control
Reference
Section
0
Uses motor encoder speed.
8.3.8
1
Uses external encoder speed.
4th 3rd 2nd 1st
digit digit digit digit
n.
Backlash Compensation Direction
0
Compensates with a reference in the forward direction.
1
Compensates with a reference in the reverse direction.
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.