Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Mechatrolink-II Communication Reference User Manual
Page 345
9 Troubleshooting
9-34
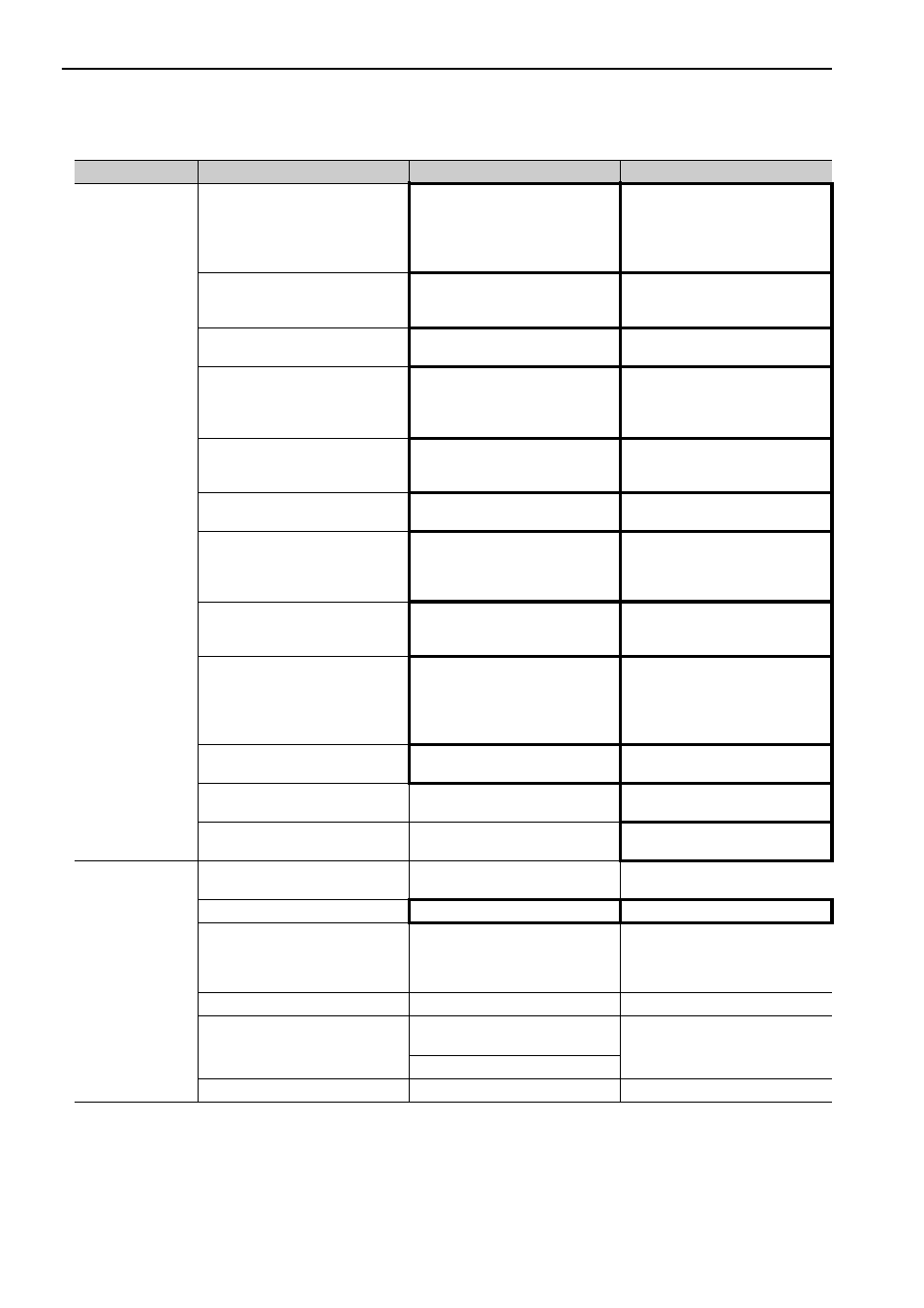
Position Error
(Without Alarm)
Noise interference due to incorrect
encoder cable specifications
The encoder cable must be tinned
annealed copper shielded twisted-
pair or screened unshielded twisted-
pair cable with a core of 0.12 mm
2
min.
Use the specified encoder cable.
Noise interference due to length of
encoder cable.
Check the length of the encoder
cable.
The encoder cable must be no more
than 50 m.
Noise influence due to damaged
encoder cable.
Check if the encoder cable is bent
and the sheath is damaged.
Replace the encoder cable and mod-
ify the cable layout.
Excessive noise to encoder cable.
Check if the encoder cable is bun-
dled with a high-current line or near
a high-current line.
• Change the cable layout so that
no surge is applied.
• Use a double-shielded encoder
cable.
The FG potential varies because of
influence from machines on the ser-
vomotor side such as the welder.
Check if the machines are correctly
grounded.
Properly ground the machines
encoder FG.
SERVOPACK pulse count error due
to noise
Check if the I/O signal line from the
encoder is influenced by noise.
Take measures against noise in the
encoder wiring.
Excessive vibration and shock to
the encoder
Check if vibration from the machine
occurred or servomotor installation
is incorrect (mounting surface accu-
racy, fixing, alignment, etc.).
Reduce the machine vibration or
mount the servomotor securely.
Unsecured coupling between
machine and servomotor
Check if a position error occurs at
the coupling between machine and
servomotor.
Secure the coupling between the
machine and servomotor.
Noise interference due to improper
I/O signal cable specifications
The I/O signal cable must be tinned
annealed copper shielded twisted-
pair or screened unshielded twisted-
pair cable with a core of 0.12 mm
2
min.
Use input signal cable with the
specified specifications.
Noise interference due to length of
I/O signal cable
Check the I/O signal cable length.
The I/O signal cable length must be
no more than 3 m.
An encoder fault occurred. (The
pulse count does not change.)
−
Replace the servomotor.
A fault occurred in the SERVO-
PACK.
−
Replace the SERVOPACK.
Servomotor
Overheated
Ambient operating temperature too
high
Measure the servomotor ambient
operating temperature.
Reduce the ambient operating tem-
perature to 40
°C or less.
Servomotor surface dirty
Visually check the surface.
Clean dust and oil from the surface.
Servomotor overloaded
Check the load status with monitor.
If an overload occurs, reduce the
load or replace the SERVOPACK,
converter, and servomotor with
models with higher capacities.
A fault occurred in the fan.
Check if the fan is rotating or not.
Replace the servomotor.
Incorrect wiring of the fan.
Check if the fan is rotating back-
ward.
Correct the wiring.
Check the wiring.
The brake is not released.
Check the operation of the brake.
Release the brake.
(cont’d)
Problem
Probable Cause
Investigative Actions
Corrective Actions