Control, 1 types of control, 1 on/off control – Super Systems 3 Series User Manual
Page 45: 2 pid control, Types of control, On/off control, Pid control
Series 3
Operations Manual
45
11. Control
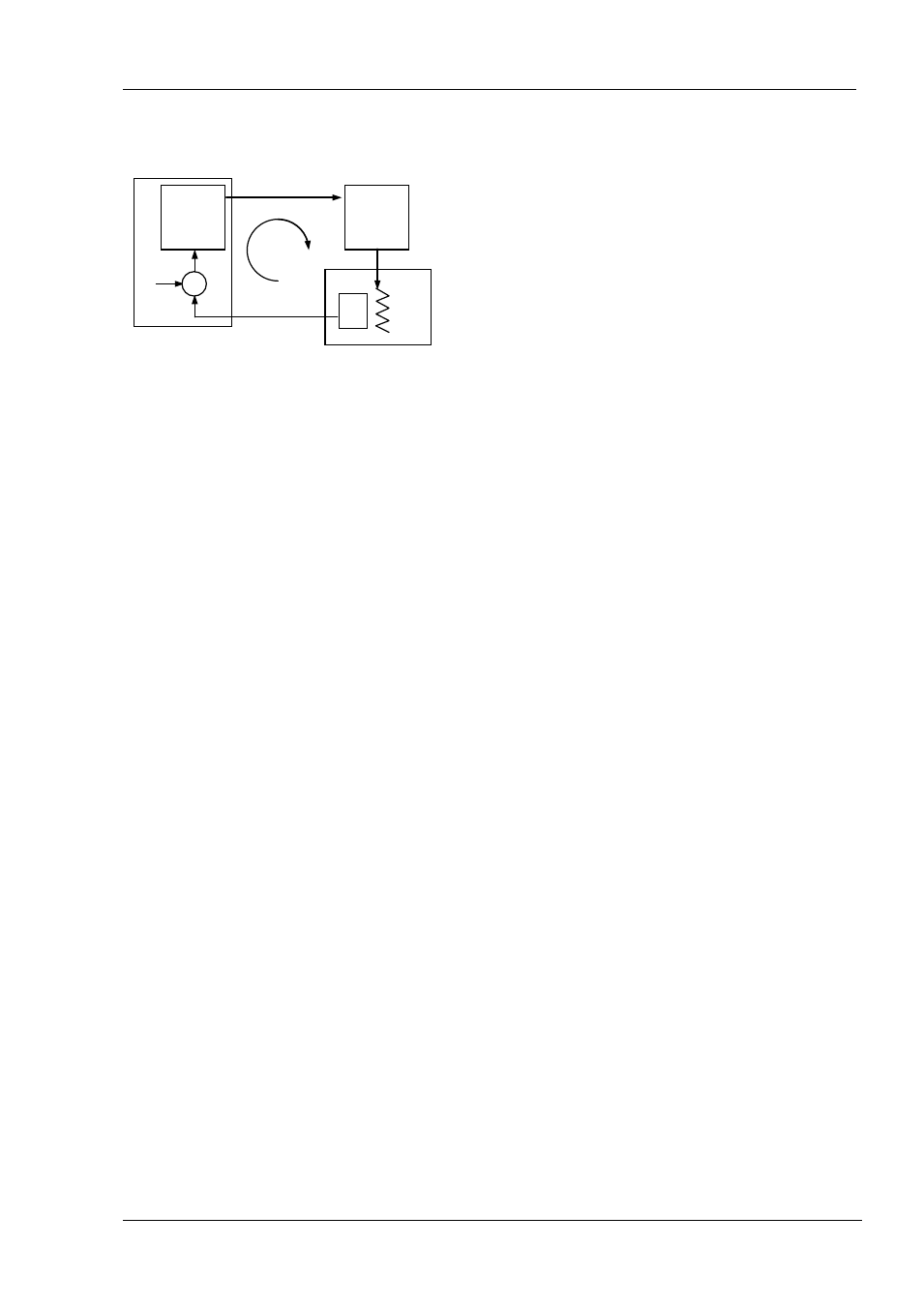
Parameters in this section allow the control loop to be set up for optimum control conditions. An example of a temperature
control loop is shown below:
The actual temperature measured at the process (PV) is connected to
the input of the controller. This is compared with a setpoint (or
required) temperature (SP). If there is an error between the set and
measured temperature the controller calculates an output value to call
for heating or cooling. The calculation depends on the process being
controlled but normally uses a PID algorithm. The output(s) from the
controller are connected to devices on the plant which cause the
heating (or cooling) demand to be adjusted which in turn is detected by
the temperature sensor. This is referred to as the control loop or closed
loop control.
11.1
Types of Control
Three types of control loop may be configured. These are On/Off control or PID control.
11.1.1
On/Off Control
On/Off control is the simplest means of control and simply turns heating power on when the PV is below setpoint and off when it
is above setpoint. As a consequence, On/Off control leads to oscillation of the process variable. This oscillation can affect the
quality of the final product and may be used on non-critical processes. A degree of hysteresis must be set in On/Off control if the
operation of the switching device is to be reduced and relay chatter is to be avoided.
If cooling is used, cooling power is turned on when the PV is above setpoint and off when it is below.
It is suitable for controlling switching devices such as relays, contactors, triacs or digital (logic) devices.
11.1.2
PID Control
PID, also referred to as ‘Three Term Control’, is an algorithm which continuously adjusts the output, according to a set of rules, to
compensate for changes in the process variable. It provides more stable control but the parameters need to be set up to match
the characteristics of the process under control.
The three terms are:
Proportional band
PB
Integral time
TI
Derivative time
TD
The output from the controller is the sum of the contributions from these three terms. The combined output is a function of the
magnitude and duration of the error signal, and the rate of change of the process value.
It is possible to turn off integral and derivative terms and control on proportional only (P), proportional plus integral (PI) or
proportional plus derivative (PD).
PI control might be used, for example, when the sensor measuring an oven temperature is susceptible to noise or other electrical
interference where derivative action could cause the heater power to fluctuate wildly.
PD control may be used, for example, on servo mechanisms.
In addition to the three terms described above, there are other parameters which determine how well the control loop performs.
These include Cutback terms, Relative Cool Gain,and Manual Reset and are described in detail in subsequent sections.
Control Output
Measured
temperature
Heater
Setpoint
Control
Method
PV
Error
Power
Regulator
Control
Loop