Hypertherm HTA Rev 6.00 Install Guide User Manual
Page 115
Appendix A: Motion Overview
103
As there is a direct relationship between the rotation of the motor shaft, the Encoder Pulses and the
distance of motion traveled (when the motor shaft turns) the control is able to calculate distance by
counting the encoder pulses received, thus closing the Position loop. So this relationship shown as a
simplified formula would be:
Encoder Pulses x Motor Revs = Distance
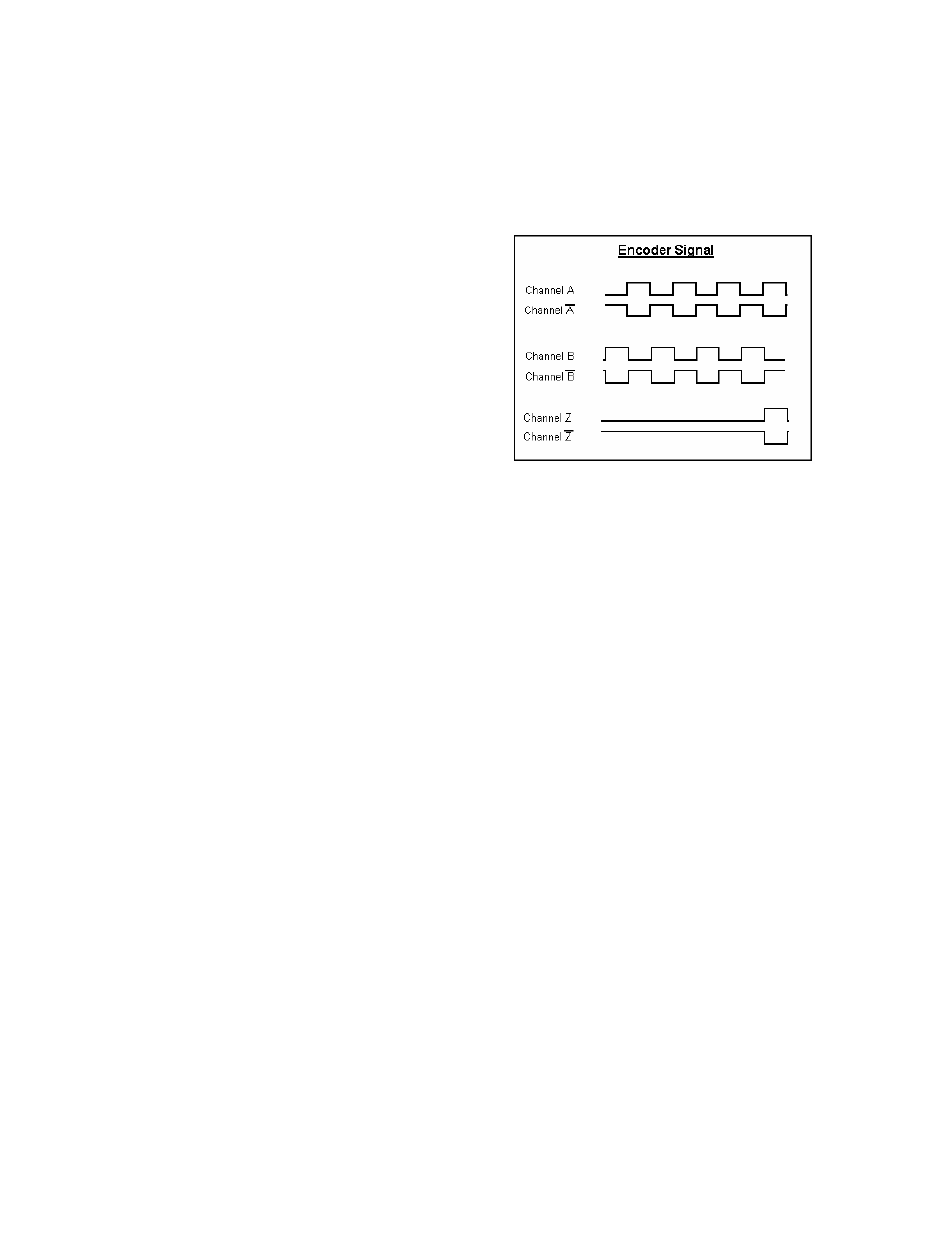
The Encoder generates a Square Wave type signal
as illustrated at the diagram to the right. Generally,
most encoders provide two main signals (A & B)
and the complements (A/ & B/). These signals are
also referred to as channels. The Compliment
channels are not always used but can provide
increased noise immunity when used. The
rotational direction (Encoder Polarity) can be
determined by the signal received (e.g. ABABA or
BABAB ).
The Z signal shown here is produced only once per
revolution and is often referred to as the Marker
Pulse. This marker pulse is quite often used for
accuracy in “Homing” routines.
The pulses generated are generally referred to as counts. The holes in the disk are also commonly
referred to as lines. You may hear someone mention that they have a 1000 line encoder. The pulses
picked up by the receiver may actual be the beginning and end of each light pulse per line for each
the two channels (A&B) resulting in a 4x mode encoder. Thus a 1000 line Encoder in 4x mode would
produce 4000 pulses or counts per revolution of the disk/ motor. The more pulses/ counts produce by
the Encoder for a given distance the greater the accuracy the motion will be.
1b) What is Following Error?
Following Error or Servo Error is the distance between the ideal commanded position from the control
and the actual position of motion. Some Following Error is to be expected as the response of the
motor can rarely ever reach the ideal command of the system due to the resistance of load being
moved. It is easiest to think of this latent response as being very much like driving a car away from a
stop light. For the car, it takes time for the engine to produce the force required to move the weight of
the car up to the desired speed. Following Error for each axis can be selected to be viewed in the
Watch Window / Status Window of the control. This is a quick reference tool for monitoring the
performance of the actual machine motion as compared to the control command.
The important consideration for X/Y coordinate motion is that the response for the X and Y motion is
similar. If the response is dissimilar, poor results for commanded motion will result. An example of a
dissimilar tuned response would that when a circular motion is commanded, a oval or elliptical motion
will result as one axis out performs the other.