Axes transverse/rail – Hypertherm HTA Rev 6.00 Install Guide User Manual
Page 69
Section 4: Password Setups
57
Axes
Transverse/Rail
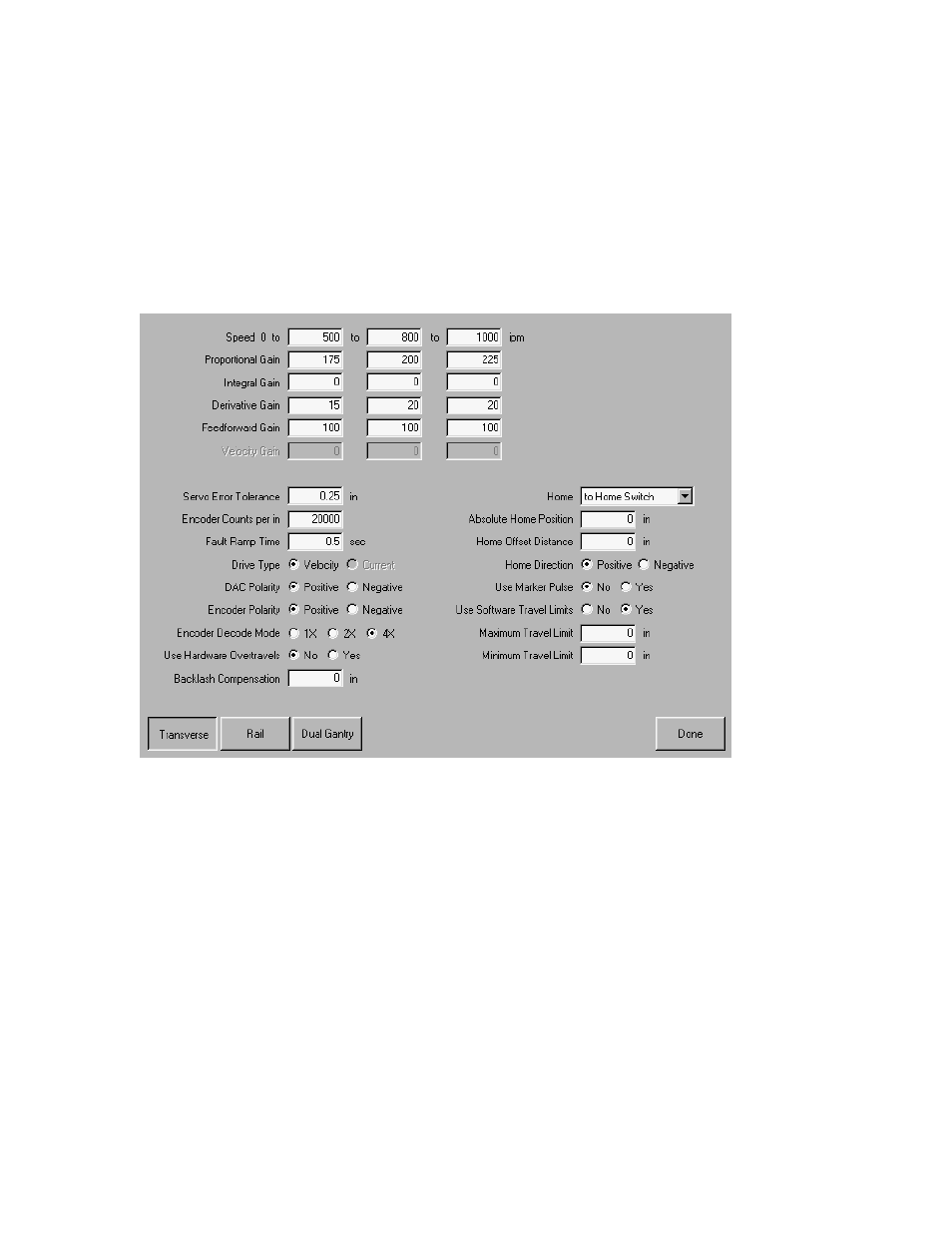
The following screen is identical for both the traverse and rail setup screens.
The control comes with both an advanced position and velocity servo loop. The following parameters
are available to help configure the servo loops for your specific drive and mechanical system.
Speed 0 To
This parameter allows the technician to input selected speed ranges to customize the gains for the
various speeds selected. Note: These speed parameters are directly tied to the Speed To field for
the acceleration rates previously noted on the Speeds setup screen. Changing these speed
parameters will replace the Speed To values entered at the Speeds setup screen.
Proportional Gain
Proportional Gain correlates to Elastic Stiffness in the control loop. Increasing the proportional gain
increases the static stiffness, but decreases response of the servo loop.
Under proportional loop control, the drive system will apply a restoring torque to the motor in
proportion the position error of the axis.
With a Proportional Gain too high, the system will be unstable which will result in overshoots, and a
generally “nervous” and shaky axis. This is also referred to as a “hot” control loop.
With a proportional gain too low, the system will respond in a loose or sloppy manner. This can be
seen in the test pattern when the outside corners become rounded and the circle segments do not all
meet in the center.