Cable loss configuration and behavior, Drive behavior at loss of communication, Apogee fln points – Yaskawa AC Drive Z1000 AC Drive HVAC Fan User Manual
Page 278: C.6 cable loss configuration and behavior
C.6 Cable Loss Configuration and Behavior
This section describes the configurable cable loss feature of the drive. This feature offers a user maximum flexibility in
determining the drive response to a loss of communication.
u
Drive Behavior At Loss of Communication
After some interval without receipt of a message, the drive can be configured to respond in one of the following manners:
• Continue at last speed
• Continue at last speed with Alarm
• Continue at preset speed
• Ramp to Stop with EF0 fault
• Coast to Stop with EF0 fault
• Emergency Stop with EF0 fault
u
APOGEE FLN Points
Three APOGEE FLN points are used to select the desired behavior:
• POINT 92 – CBL LOSS TMR
• POINT 91 – CBL LOSS FRQ
• POINT 90 – COMM FLT ENA
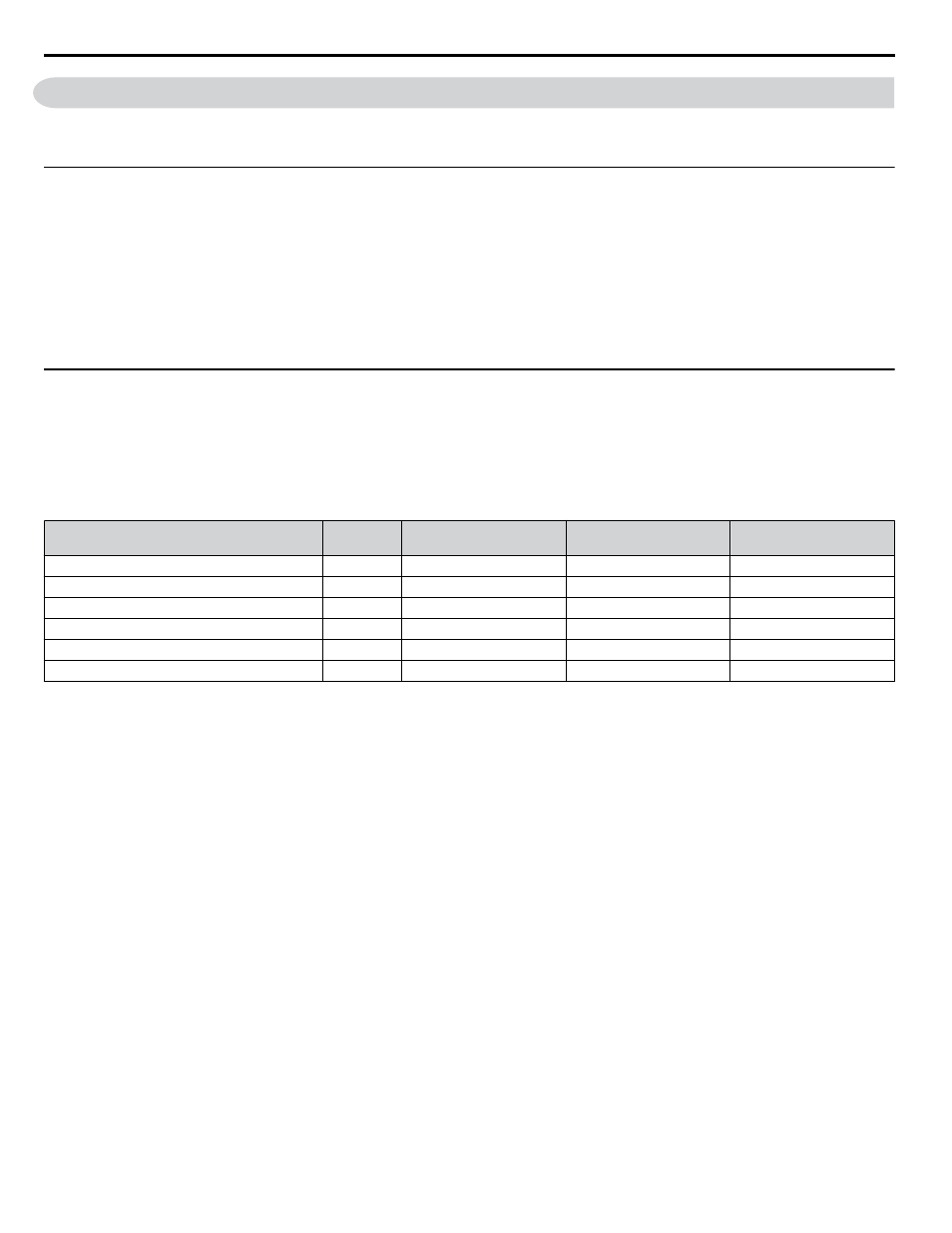
Table C.4 Cable Loss Behavior Summary
Behavior
H5-04
Setting
CBL LOSS TMR
(Point 92)
CBL LOSS FRQ
(Point 91)
COMM FLT ENA
(Point 90)
Decelerate to stop (stop time in C1-02) EF0 Fault
0
Timeout interval
X
On
Coast to stop EF0 Fault
1
Timeout interval
X
On
Fast stop (stop time in C1-09) EF0 Fault
2
Timeout interval
X
On
Continue at last speed
3
0
X
X
Continue at last speed with alarm
3
Timeout interval
X
On
Continue at preset speed with alarm
4
Timeout interval
Preset speed
On
Note:
1. Communication must first be established and then lost for these features to function as described. If a drive is powered-up without a
cable connected or with the master controller offline, a communications timeout does not occur.
2. For modes which describe the drive running after a communications timeout, a Run command must have been issued (RUN ENABLE
(Point 35) = ‘On’ and either CMD RUN.FWD (Point 22) = ‘On’ or CMD RUN.REV (Point 24) = ‘On’) prior to loss of communications.
For safety purposes, the drive will not automatically restart from a stopped condition. If a user requires the drive to restart automatically,
additional external wiring is required to accomplish this (consult factory).
Upon expiration of the communications timeout interval, a CE (Communication Error) fault will be declared and will remain
until communication is restored.
n
Continue at Last Speed
In this mode, CBL LOSS TMR (POINT 92) is set to 0, disabling the cable loss feature. The other two settings, CBL LOSS
FRQ (POINT 91) and COMM FLT ENA (POINT 90), are ignored. If communication is lost, the drive maintains its last
commanded state. The drive will not display an alarm or fault to indicate it has lost communication. This behavior can also
be achieved by setting parameter H5-04 to 3. The drive will display an alarm and continue running. For this specific condition,
the COMM FLT ENA(POINT 90) must be enabled and CBL LOSS TMR (POINT 91) should be set to a value other than 0.
A CE drive alarm will be set.
n
Continue at Preset Speed
In this mode, CBL LOSS TMR (POINT 92) is set to the desired interval, CBL LOSS FRQ (POINT 91) is set to the desired
preset speed and H5-04 is set to 4. If the time between messages exceeds the timeout interval, the drive speed command,
INPUT REF 1, (Point 60) is set to the CBL LOSS FRQ (POINT 91) and the drive continues running at this new speed. COMM
FLT ENA (POINT 90) must be set to ON.
n
Stop
COMM FLT ENA (POINT 90) must be set to ON. In this mode, CBL LOSS TMR (POINT 92) is set to the desired interval
and parameter H5-04 is set to a value of 0, 1, or 2. If the time between messages exceeds the timeout interval, the drive’s speed
command, INPUT REF 1, (Point 60) is set to 0. The stopping method is determined by the setting of H5-04. A CE drive fault
C.6 Cable Loss Configuration and Behavior
278
YASKAWA ELECTRIC SIEP YAIZ1U 03A YASKAWA AC Drive – Z1000 Programming Manual