3 ) setting the fixed parameters – Yaskawa MP2000 Series I/O Module User Manual User Manual
Page 105
4.3 LIO-06 Module Details
4.3.3 Counter Module Configuration
105
4
LIO-06 Module
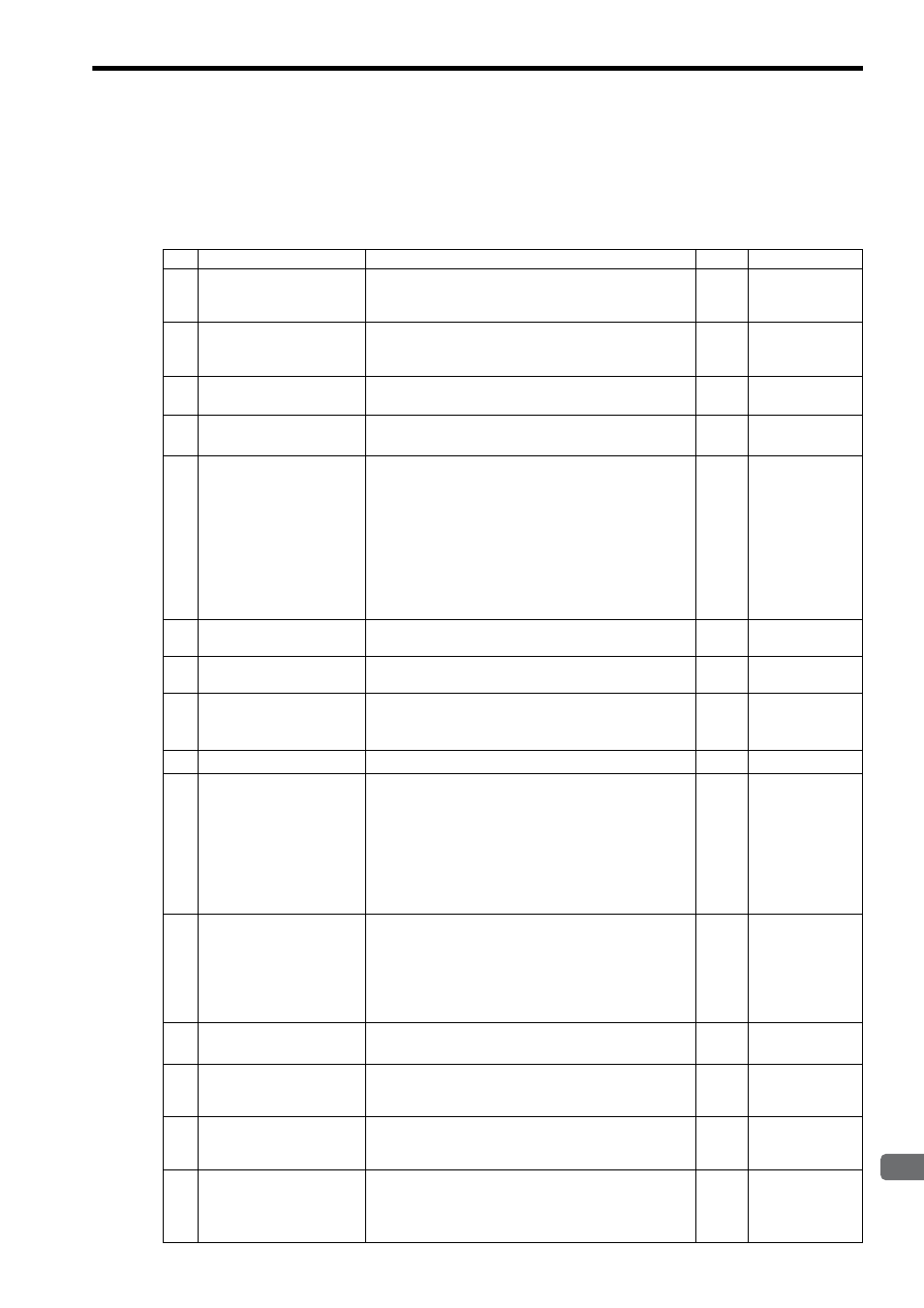
( 3 ) Setting the Fixed Parameters
Set the following fixed parameters in the Fix Parameter Set tab page in the Counter Module Window.
Counter Fixed Parameters
No.
Name
Description
Size
Default
SYNC-SCAN
(Synchronous Scan
Selection)
Select a scan cycle of the MP2000 Series Machine Control-
ler to update the I/O data of counter function: High-speed
scan or Low-speed scan.
High
The First Register Number
(Leading Register
Number)
Displays the leading register number that corresponds to the
parameter. This setting is disabled.
1 word
01
A/B Pulse Signal Form
Selection
Signal form of phases A and B. The signal form is fixed to
a +5V differential input.
1 word
Fixed to +5V
(differential input)
02
A/B Pulse Signal Polarity
Selection
*1
Select either positive or negative logic for the signal polarity
of phases A and B.
1 word
Positive logic
03
Pulse Counting Mode
Selection
*1
Specify the pulse counting mode
*1
among the following 7
equations.
• Pulse and Direction
• Pulse and Direction
∗ 2
• Up/Down Counter
• Up/Down Counter
∗ 2
• A/B Pulse
• A/B Pulse
∗ 2
• A/B Pulse (Quadrature)
1 word
A/B Pulse
(Quadrature)
04
Counter Mode Selection
The counter mode is fixed to Up/Down Counter.
1 word
Fixed to Up/Down
Counter
05
Coincidence Detection
Function Use Selection
Set whether or not the coincidence detection
*2
is to be used. 1 word
Not use
06
Coincidence Interrupt
Function Use Selection
Set whether or not the coincidence interrupt function
*2
is to
be used.
(Valid only when the coincidence detection function is set.)
1 word
Not use
07
Axis Selection
Set the axis type
*3
: Finite or infinite length axis.
1 word
Finite length axis
08
Reference Unit Selection
Specify the reference unit.
• pulse
• mm
• deg
• inch
If pulse is selected, an electronic gear is not to be used; If a
unit other than pulse is selected, an electronic gear is to be
used.
1 word
pulse
09
Number of Digits Below
Decimal Point
Set the number of digits 0 to 5 below the decimal point
*4
for the minimum reference unit.
Example:
If the minimum reference unit is 1
μm (10
−3
mm):
Reference unit selection : mm, and
Number of digits below decimal point: 3
1 word
3
10
Travel Distance per
Machine Rotation
*4, *5
Set the load moving amount per load axis rotation.
Setting range: 1 to 2147483647 (reference unit)
2 words
10000
11
Encoder Gear Ratio
*4, *5
Set the value m so that the encoder axis rotates m times
when the load axis rotates n times.
Setting range: 1 to 65535
1 word
1
12
Machine Gear Ratio
(Load)
*4, *5
Set the value n so that the encoder axis rotates m times when
the load axis rotates n times.
Setting range: 1 to 65535
1 word
1
13
Maximum Value of Rotary
Counter (Infinite Length
Axis Reset Position
(POSMAX))
*3
If the Infinite Length Axis was selected for fixed parameter
No.07, specify the number of rotations (1 to 2147483647
reference units) after which the axis will be reset.
2 words
360000