Adept AdeptSight Reference Guide User Manual
Page 22
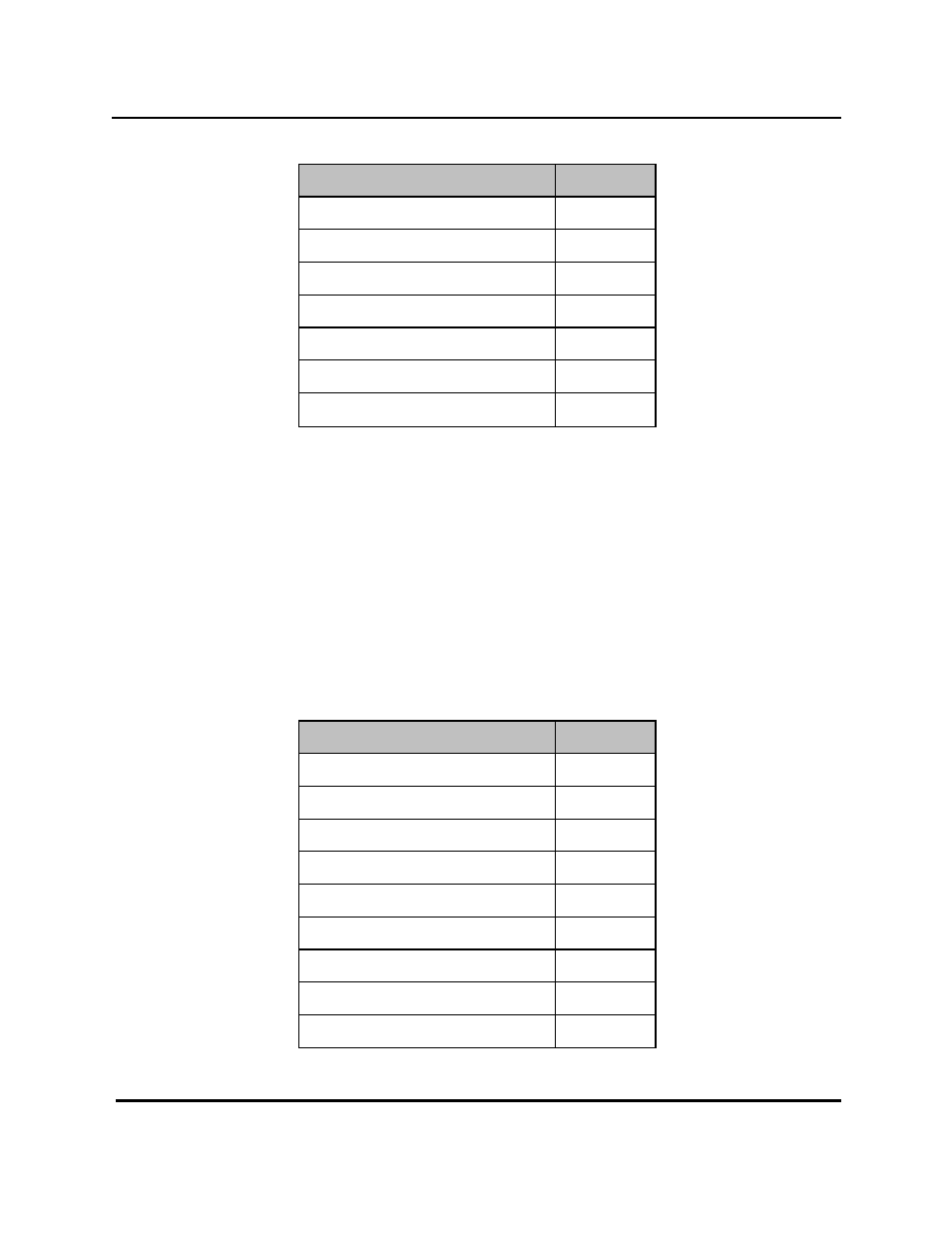
Property Name
Code
ModelBasedScaleFactorMode
220
ModelBasedMinimumScaleFactor
221
ModelBasedMaximumScaleFactor
222
ModelBasedRotationMode
223
ModelBasedMinimumRotation
224
ModelBasedMaximumRotation
225
ModelEnabled
405
FrameTranslationX (2400), FrameTranslationY (2401), and FrameRotation (2402) should be
replaced with the InstanceTranslationX (1315), InstanceTranslationY (1316), and
InstanceRotation (1314). The Instance parameter has been expanded to support all tools.
5.
Table-mounted camera refinement has changed. In AdeptSight 2.x, a table-mounted camera is
treated as a special case, and the results are used to directly offset a target position for placement.
In AdeptSight 3.x, the table-mounted camera is not treated as a special case. If you use a table-
mounted camera, command code 1311 returns the world location of the located vision object.
In addition, the instruction InstanceToolOffset (command code 1372) has been added to return
the location of the vision object relative to the gripper tip at the time the picture was taken. For
details, see InstanceToolOffset.
6.
Additional properties and corresponding command codes have been added to enable the reading of
a robot gripper IO:
Property Name
Code
GripperOutputOpen
5511
GripperOutputClose
5512
GripperOutputRelease
5513
GripperInputOpen
5514
GripperInputClose
5515
GripperOutputExtend
5516
GripperOutputRetract
5517
GripperInputExtend
5518
GripperInputRetract
5519
NOTE: In version 3.1, the parameters for these were modified to the following:
RecentChanges
AdeptSight Reference Guide, v3.2.x, Updated: 5/8/2012
Page 22