Adept AdeptSight Reference Guide User Manual
Page 31
To retrieve specific values
To retrieve global values:
sequence_id = -1, tool_id = -1
To retrieve camera
values:
sequence_id = -1, tool_id = cameraIndex
To retrieve camera-
relative-to robot values:
sequence_id = -1, tool_id = cameraIndex, index_id = robotIndex
To retrieve sequence
values:
sequence_id = sequenceIndex, tool_id = -1
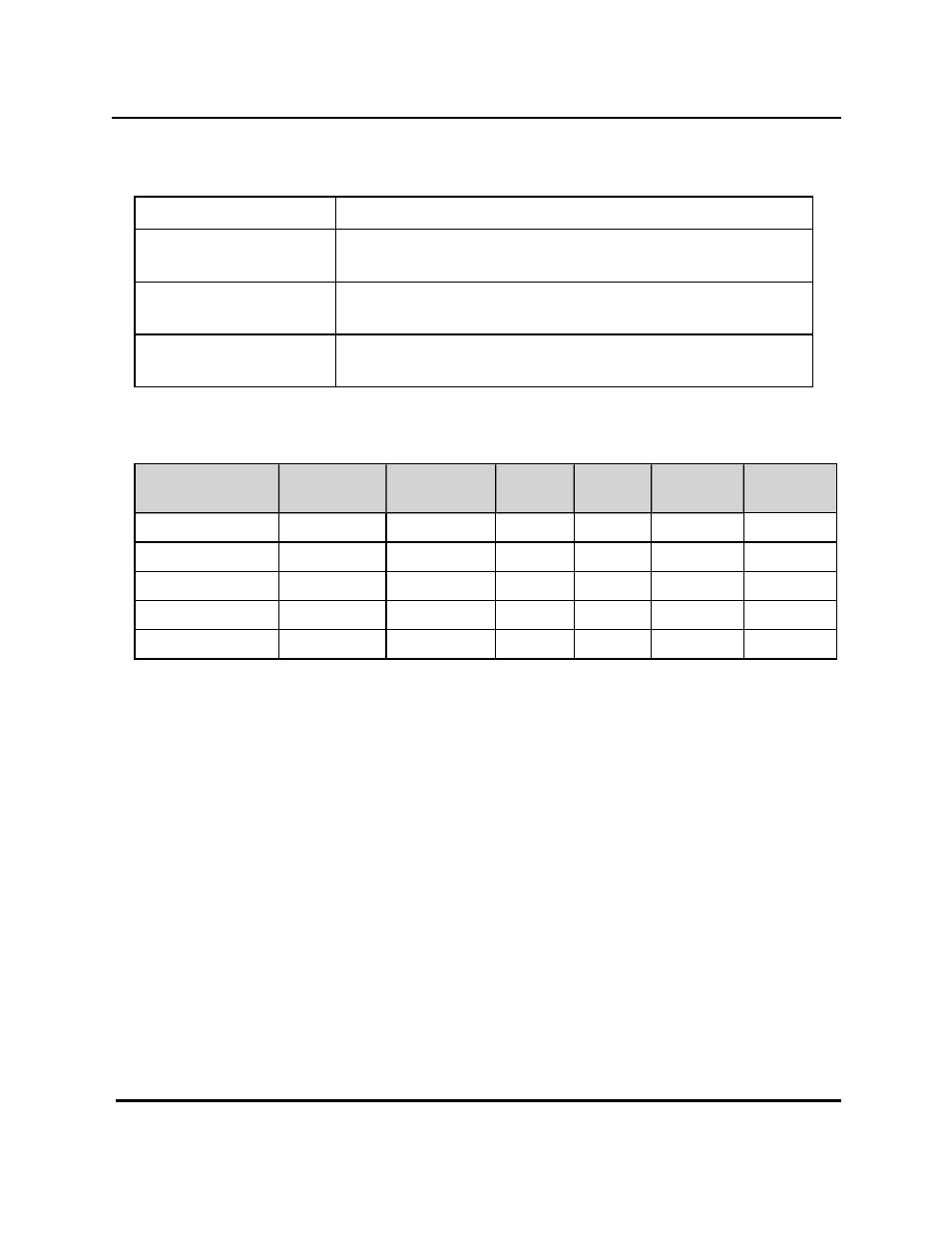
To retrieve Belt Calibration related values (read only)
Property
sequence_id
tool_id
instance-
_id
result_id index_id
frame_id
Frame
-1
cameraIndex
n/a
10000
robotIndex
n/a
UpstreamLimit
-1
cameraIndex
n/a
10001
robotIndex
n/a
DownstreamLimit
-1
cameraIndex
n/a
10002
robotIndex
n/a
NearsideLimit
-1
cameraIndex
n/a
10003
robotIndex
n/a
VisionOrigin
-1
cameraIndex
n/a
10050
robotIndex
n/a
Examples
Example 1
In this example, the 1311 result ID indicates using the first gripper offset. This is equivalent to using
the 1400 result ID.
; Retrieve the location of a found instance
; instance location = 1311
SET location = VLOCATION($ip, 1, 2, 1, 1311)
Example 2
; set 1st gripper offset location
; 1st gripper offset location = 1400
SET location = VLOCATION ($ip, 1, 2, 1, 1400)
; set 2nd gripper offset location
SET location = VLOCATION ($ip, 1, 2, 1, 1401)
...
VLOCATION transformation function
AdeptSight Reference Guide, v3.2.x, Updated: 5/8/2012
Page 31