Yaskawa MP940 User Manual
Page 284
Parameters
6.3.3 Motion Monitoring Parameter Details
6-44
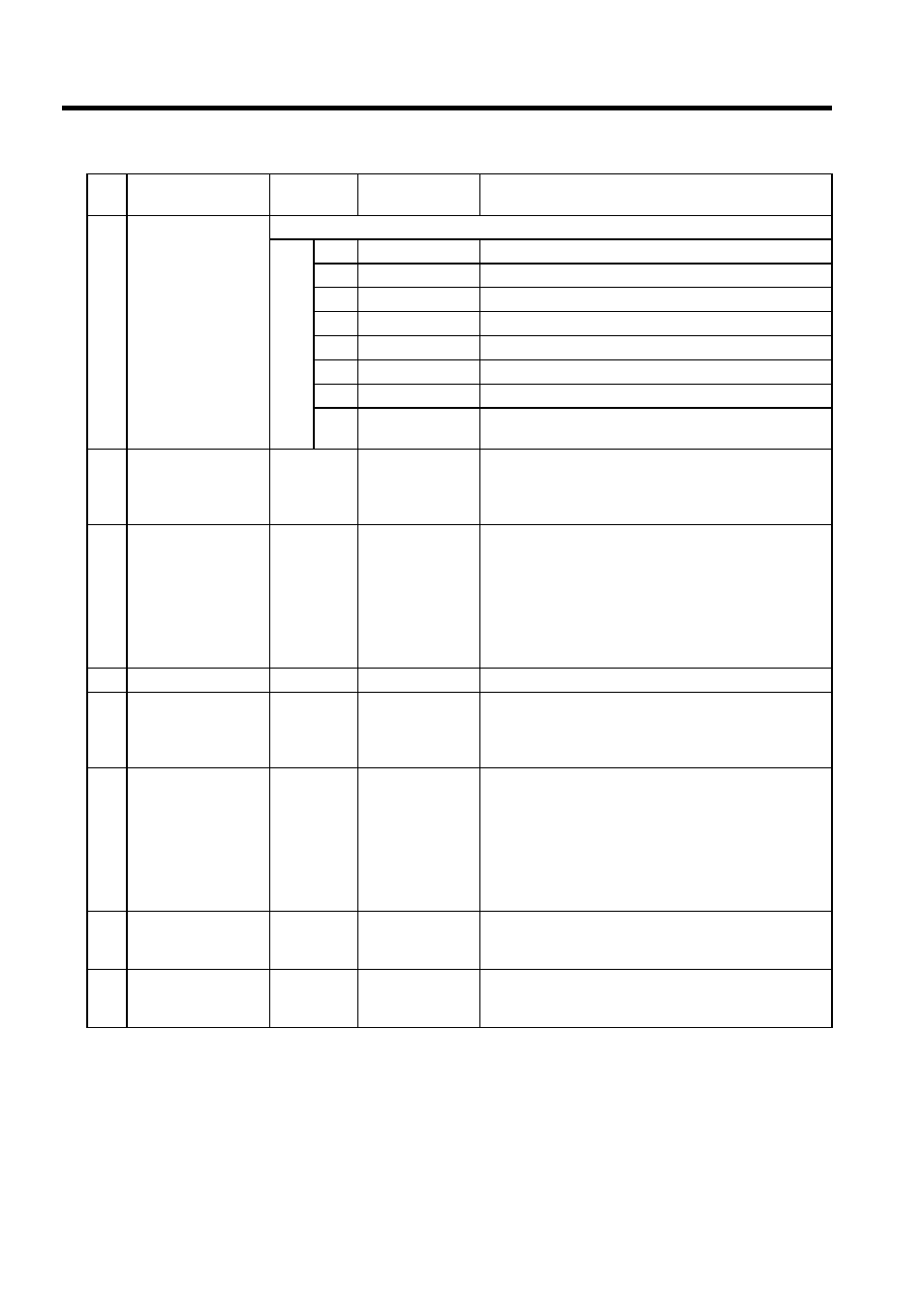
38
Servodrive I/O
Monitor (SVIOMON)
IWC025
Bit
0
SIO
General input signal
1
DEC
Deceleration dog switch
2
P-OT
Positive limit switch input
3
N-OT
Negative limit switch input
4
EXT1
External input signal 1
5
EXT2
External input signal 2
6
EXT3
External input signal 3
7 to
15
---
Not used.
39
Speed Reference
Output Monitor
(RVMON)
ILC026
-2
31
to 2
31
-1
This parameter indicates the travel distance every scan and is
“0” when IBC0170: Machine Locked is ON. It is valid in
Position Control Mode when an OWC020: Motion Com-
mand Code is used.
41
Position Buffer Read
Data (CNMON)
ILC028
-2
31
to 2
31
-1
Position data from the position buffer specified at OLC038:
Position Buffer Access Number is read and stored at this
parameter when motion setting parameter OBC021F: Posi-
tion Buffer Read turns ON.
It takes about 2 scans from the time that OBC021F: Position
Buffer Read turns ON until data is stored at this register. It is
valid in Position Control Mode when an OWC020: Motion
Command Code is used.
43
Not used.
ILC02A
---
---
45
Integral Output
Monitor (YIMON)
ILC02C
-2
31
to 2
31
-1
This parameter indicates the integral output value when posi-
tion loop is used with PI control. (Refer to bit 8 of
OWC021.) It is valid in Position Control Mode or Zero Point
Return Mode.
47
Calculated
Reference
Coordinate System
Position (POS)
ILC02E
-2
31
to 2
31
-1
This parameter has meaning when the motion fixed parame-
ter: Axis Selection (bit 5 of the Motion Controller Function
Selection Flags) is set to an infinite length axis (= 1). It indi-
cates the target position for every infinite length axis scan.
Refer to Position Monitoring in 11.3.1 Prerequisites for
Position Control for details.
It is valid in Position Control Mode when an OWC020:
Motion Command Code is used.
49
Primary Lag Monitor
(LAGMON)
ILC030
-2
31
to 2
31
-1
This parameter indicates (PI output - Primary lag output) and
is valid in Position Control Mode or Zero Point Return
Mode.
51
Position Loop Output
Monitor (PIMON)
ILC032
-2
31
to 2
31
-1
This parameter indicates the position loop output value
(prior to adding the calculated feed forward value). It is valid
in Position Control Mode or Zero Point Return Mode.
No.
Name
Register
No.
Bit Name
Description