Yaskawa MP940 User Manual
Page 453
11.4 Position Control Using Motion Commands
11-51
11
4
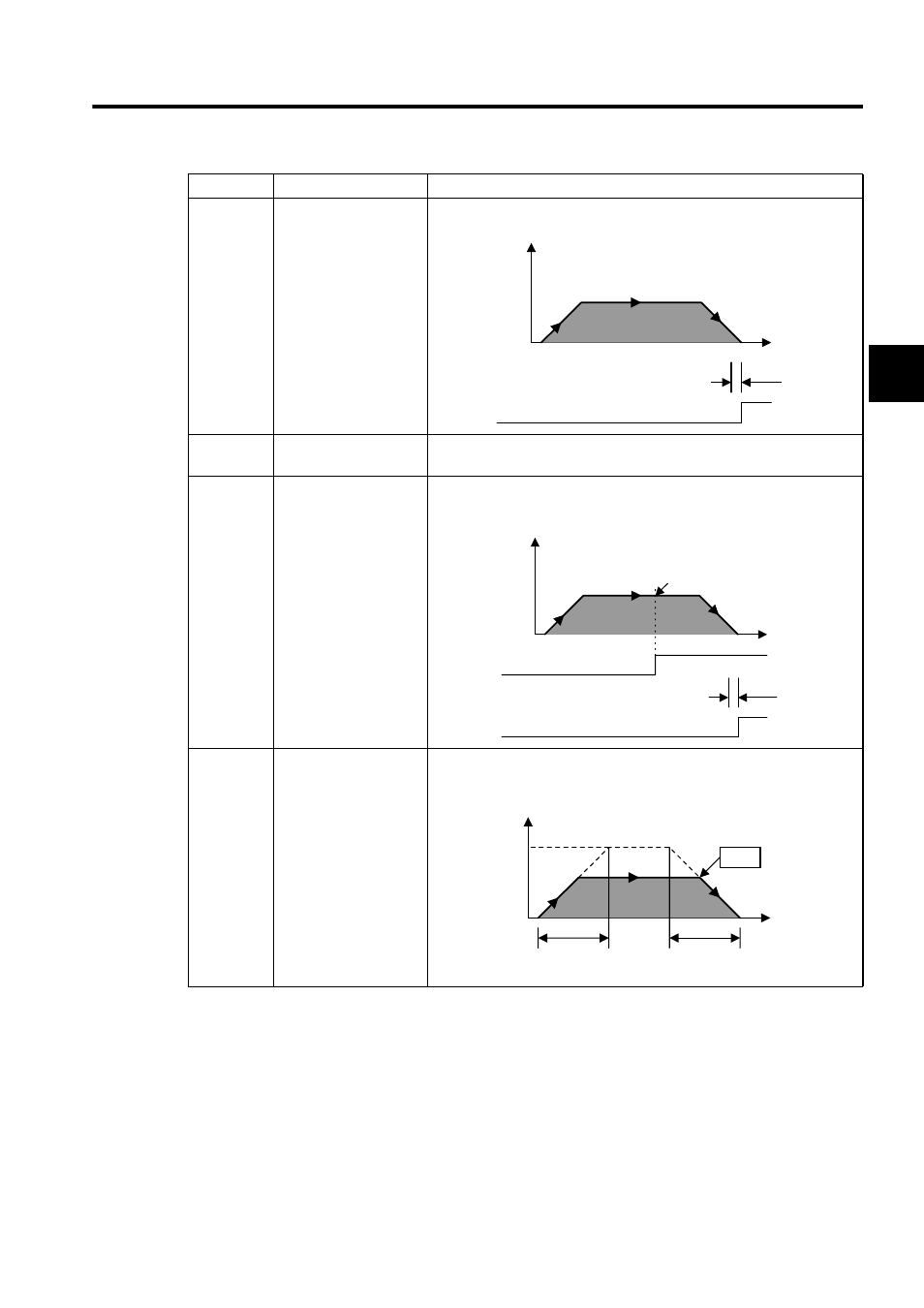
Interpolation
(INTERPOLATE)
Performs interpolation feeding using the position data distributed from the
CPU Module.
5
Not used.
This command is used by the system.
Do not use it in a user program.
6
Interpolation with
Position Detection
(LATCH)
Latches a counter when a latch signal is input during an interpolation feed
operation, and reports the changed latch position to the reference unit sys-
tem.
7
Fixed Speed Feed
(FEED)
Performs rapid traverse in the infinite length direction at the specified speed
and acceleration time.
Command
Name
Description
0
POSCOMP
Speed
(%)
Position
Time (t)
Positioning completed range
0
POSCOMP
Speed
(%)
Position
Time (t)
Positioning completed range
Reports this position.
(ILxx06)
Latch signal
0
NOP
100%
Speed (%)
* The position is the speed
reference integral value.
Rated speed
Rapid
traverse
speed
Position*
command
Time (t)
Linear acceleration
time constant
Linear deceleration
time constant