Yaskawa MP940 User Manual
Page 295
6.4 Parameters for SGDH SERVOPACK
6-55
6
Pn10B
Gain-related
Application
Switches
1
IP Control
(0, 1)
0: PI control
1: IP control
0
Speed
Torque
Position
2
Reserved
-
0
3
Reserved
-
0
Pn10C
Mode Switch: Torque
Reference
%
0 to 800
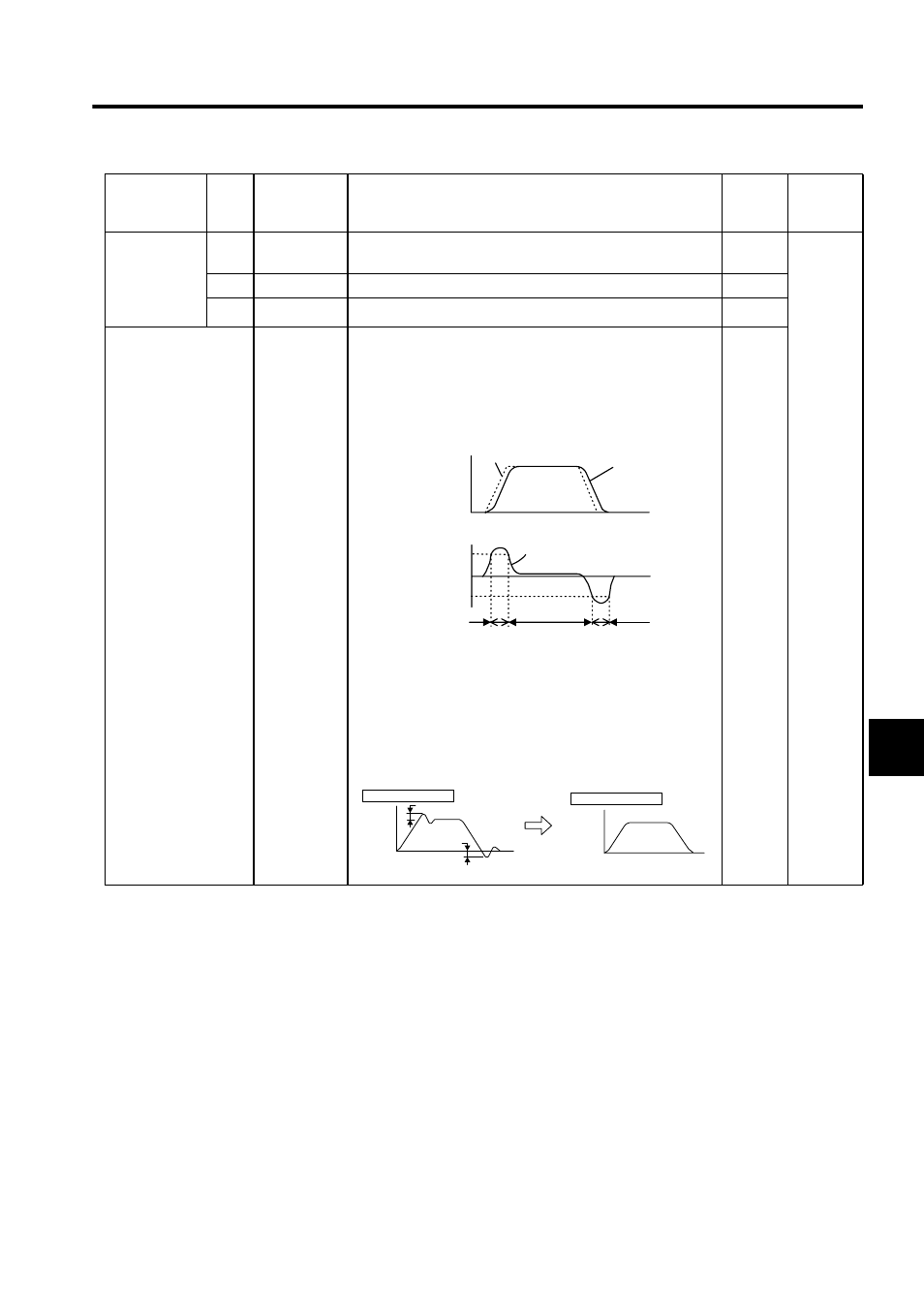
Pn10B.0=0: Torque Reference Used as Detection Point
With this setting, if the value of torque reference input exceeds
the torque set in parameter Pn10C, the speed loop switches to P
control.
The SERVOPACK is factory-set to this standard mode (Pn10C =
200).
Operating Example
If the system is always in PI control without using the mode
switch function, the speed of the motor may overshoot or under-
shoot due to torque saturation at the time of the acceleration or
deceleration of the motor. The mode switch function suppresses
torque saturation and eliminates the overshooting or undershoot-
ing of the speed of the motor.
200
Parameter No. Digit
Name
(Setting
Range)
Details
Default
Control
Modes
+Pn10C
-Pn10C
Speed
Reference speed
Motor speed
Internal torque reference
Torque 0
PI control
PI control
PI control
P control
P control
No mode switch function
Motor
speed
Overshooting
Under-
shooting
With mode switch function
Motor
speed
Time
Time