Yaskawa MP940 User Manual
Page 478
Motion Control
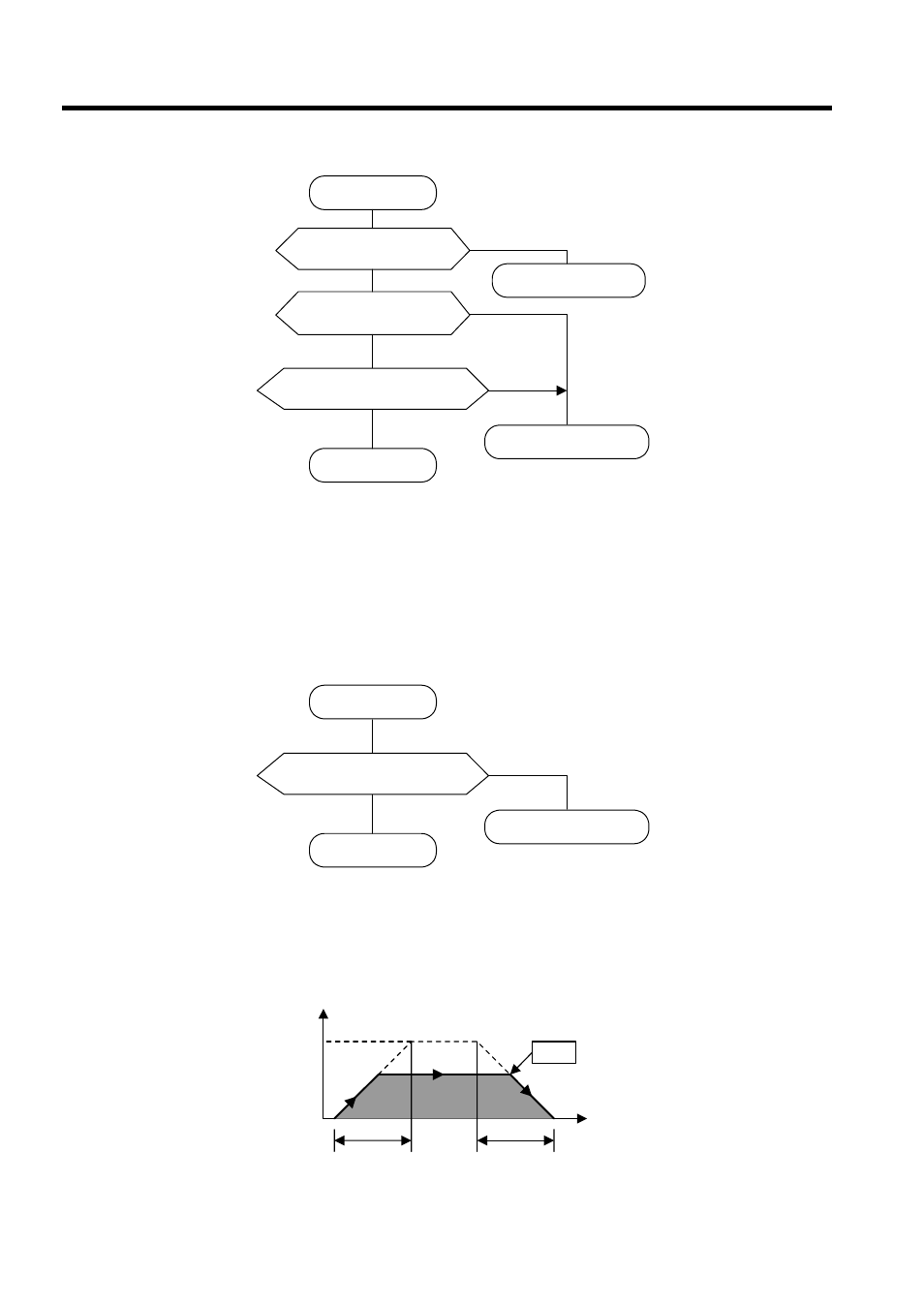
11.4.7 Fixed Speed Feed (FEED)
11-76
The axis performs fixed speed feed using the specified motion parameter.
Fixed speed feed cannot be temporarily stopped.
7. To stop (abort) fixed speed feed, set NOP (= 0) in the motion command code
(OWC020).
8. When the axis enters the Positioning Completed Range (OWC00E) after Distribution
Completed (bit 2 of IWC015 is ON), the POSCOMP Positioning Completed Signal (bit
D of IWC000) turns ON.
User Program Example: Fixed Speed Feed
Example of RUN Operation
Fig 11.26 Example of a Fixed Speed Feed Pattern
FEED
=
NOP∥FEED?
YES
YES
YES
NO
NO
NO
=
NOP∥FEED?
Start condition check
Control mode = position
control mode?
Return (NG)
Return (NG)
Motion command code
Motion command response
Return (OK)
FEED
NO
YES
=
FEED?
End condition check
Motion command response
Return (FEED executing)
Return (FEED
completed)
0
NOP
100%
*The position is the speed
reference integral value.
Speed
(%)
Rated speed
Rapid
traverse
speed
command
Position*
Time (t)
Linear acceleration
time constant
Linear deceleration
time constant