Basler Electric BE1-BPR User Manual
Page 84
4-32
BE1-BPR Functional Description
9272000990 Rev J
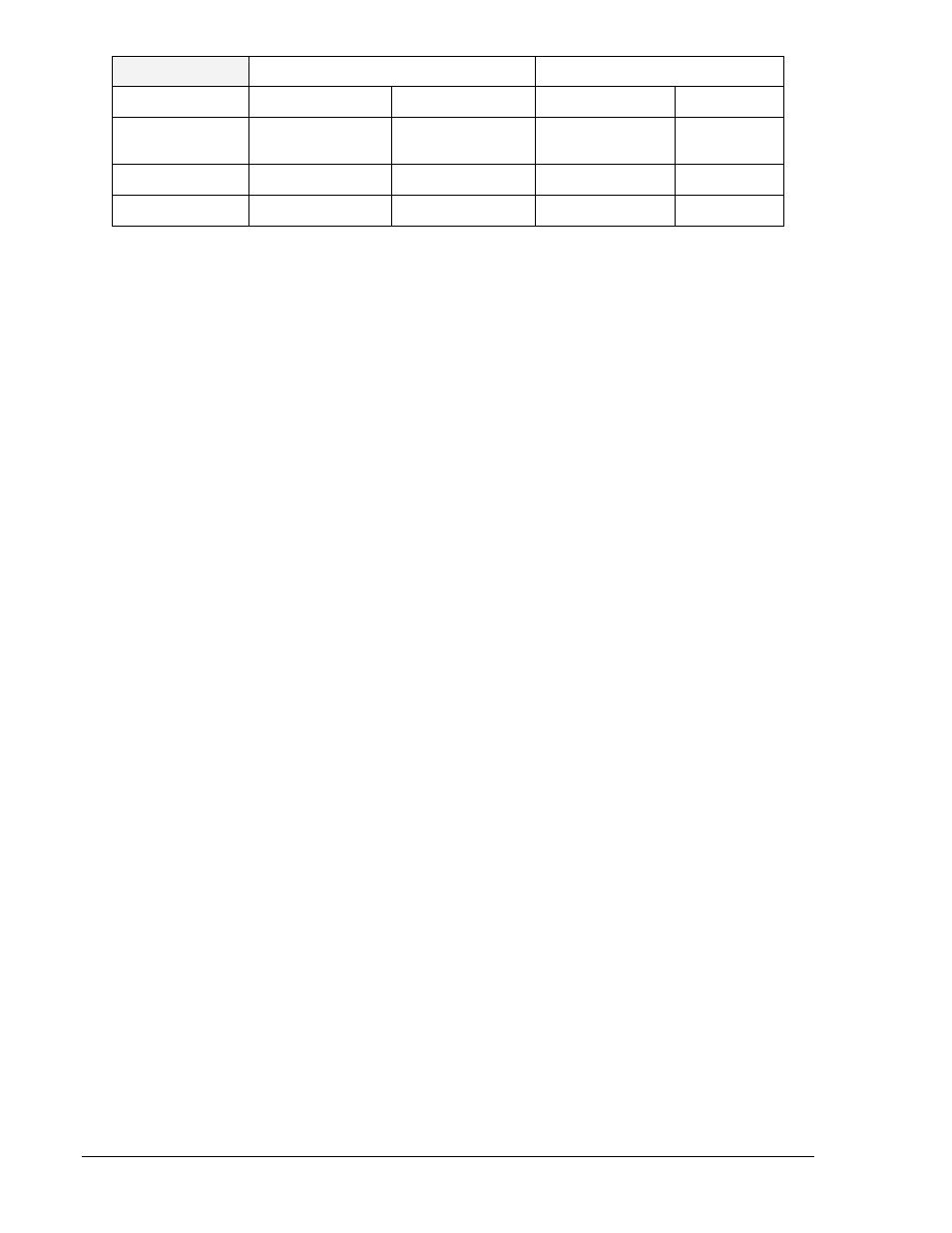
BKRCON
Breaker duty monitoring
HMI Menu Branch: N/A
Parameter
Unit of Measure
Range
Increment
Default
DMAX
Primary A
2
seconds
0 to 6.8E38
0.001
0.000E00
Tc
Milliseconds
0 to ±200
1
0
Ti
Milliseconds
0 to ±200
1
0
BKRCON Command
Purpose:
Read or change breaker contact duty monitoring settings.
Syntax:
BKRCON[=<DMAX>,<Tc>,<Ti>]
Comments:
Tc is a negative value when the 52b contacts change state after the main contacts open.
Tc is a positive value when the 52b contacts change state before the main contacts open.
Ti sets the point where the last full cycle of current calculations ends and is taken relative
to the 52b status. Positive Ti is after the 52b.
This function is available on enhanced BE1-BPR relays only. An access area 1 or 3
password is required to change settings.
BKRCON Command Examples:
1. Set Tc at 6 milliseconds, Ti at 8 milliseconds, and DMAX at 10 kA-seconds.
BKRCON=1.0E4,6,8
2. Read breaker contact information
BKRCON
BKRCON=1.0E4,8,8
3. Set the Tc parameter of the BKRCON command for a breaker whose 52b contact closes 3
milliseconds after the main contacts part. Recognition time for the 52b contact has been set at 4
milliseconds using the LI command. Note that Tc is set as the sum of the 52b recognition time setting
and the 52b contact delay. (–3–4=7 ms). Set Ti for 5 milliseconds after the 52b contact is recognized.
The timing diagram is shown in Figure 4-8.
BKRCON=1.0E4,-7,5
Both Tc and Ti are referenced to that instant in time when the 52b contact is recognized. If Tc or Ti
occurs after the 52b contact is recognized, they are positive time values. Otherwise, they are negative
time values. Be sure to offset Tc and Ti by the 52b recognition time (LI command, see Section 5,
BESTlogic Programmable Logic, Contact Input Logic, Definition of Input Contact Operation).