Yaskawa i80M Appendix User Manual
Page 162
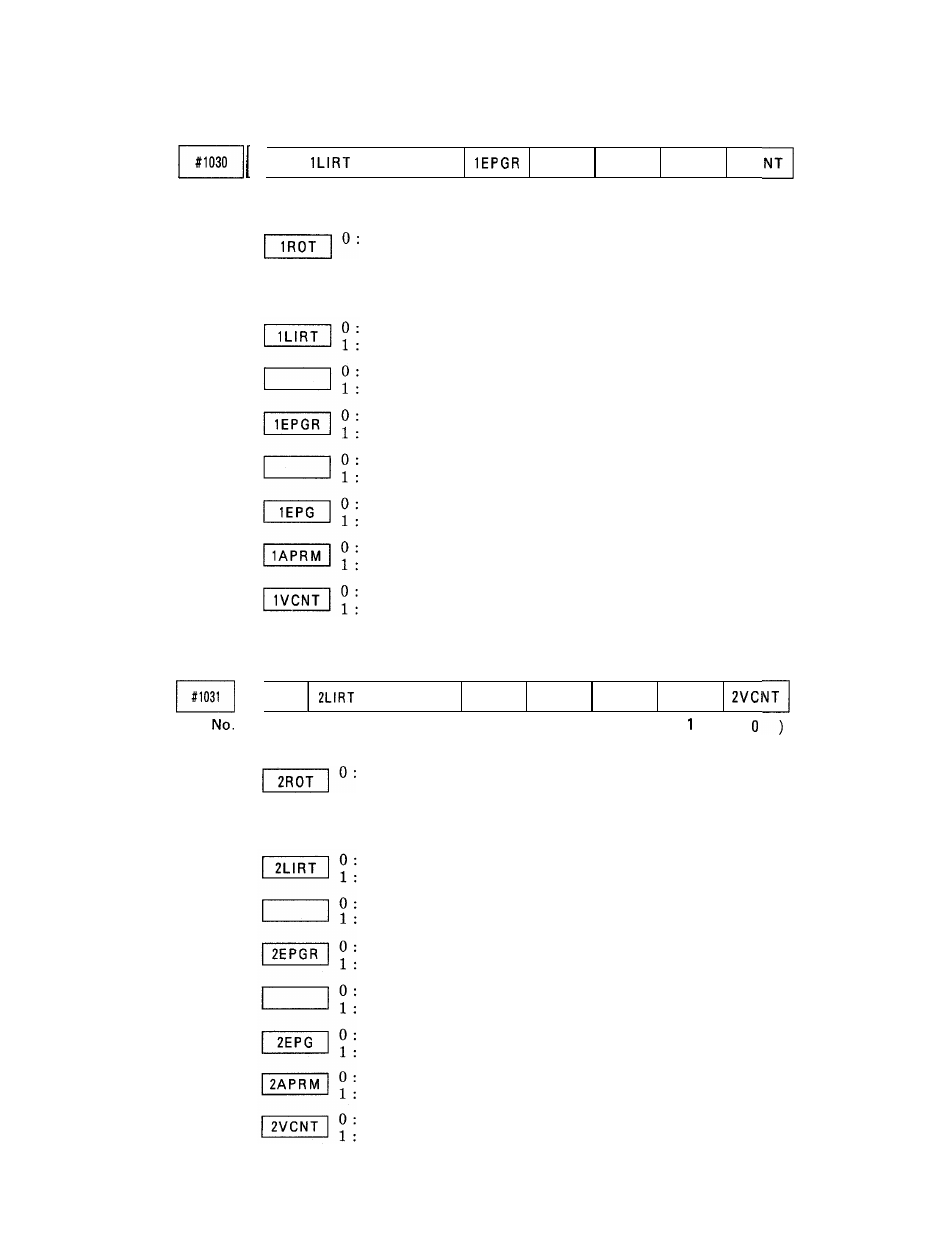
9.2 PARAMETER NUMBER TABLE (Cent’d)
Parameter No.
N A M E
1
’
0
’
I
I
lEPG
l A P R M
lVCNT
(Bit No.
7
6
5
4
3
2
1
o
)
1 :
Parameter No
X-axis servo-controlled motor revolution direction
NORMAL.
X-axis servo-controlled motor revolution direction
REVERSE.
Uses linear axis as X-axis servo control.
Uses rotating axis as X-axis servo control.
X-axis separate type PG reverse connection is disabled.
X-axis separate type PG reverse connection is enabled.
X-axis separate type PG is disabled.
X-axis separate type PG is enabled.
Speed loop auto setting is disabled.
Speed loop auto setting is enabled.
PI speed loop control method is used.
1P speed loop control method is used.
N A M E
I
2
’
0
’
I
2EPGR
2EPG
2APRM
( B i t
7
6
5
4
3
2
1 :
Y-axis servo control form motor revolution direction
NORMAL.
Y-axis servo control form motor revolution direction
REVERSE.
Uses linear axis as Y-axis servo control.
Uses rotating axis for Y-axis servo control.
Y-axis separate type PG reverse connection is disabled.
Y-axis separate type PG reverse connection is enabled.
Y-axis separate type PG is disabled,
Y-axis separate type PG is enabled.
Speed loop auto setting is disabled.
Speed loop auto setting is enabled.
PI speed loop control method is used.
1P speed loop control method is used.
– 162 –