Error description – Yaskawa MotionWorks IEC Toolboxes User Manual
Page 473
PLCopen Toolbox: Function Blocks
MotionWorks IEC61131-3 Toolboxes: 2013-09-13
460
•
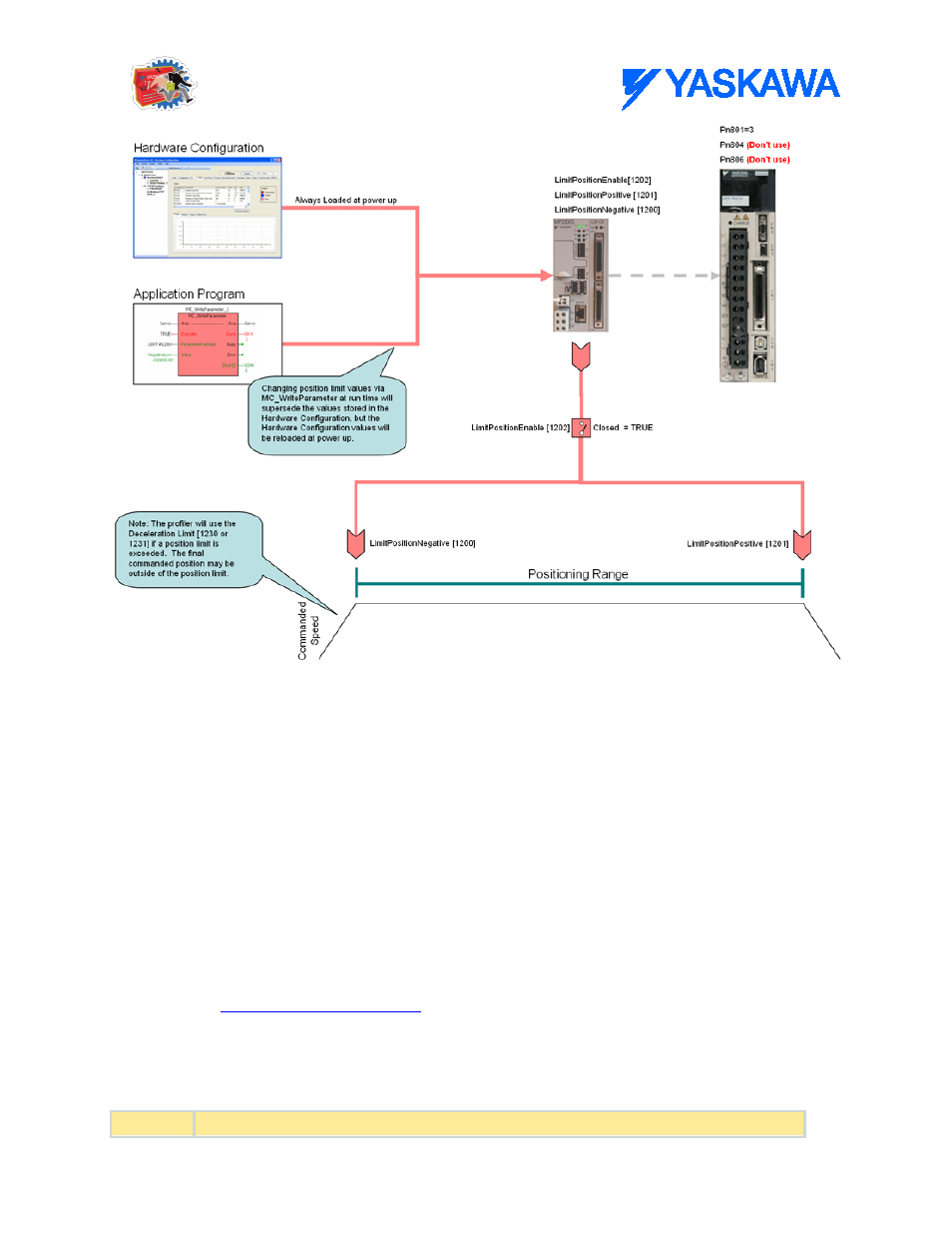
The software position limits are managed by the MP2000iec controller. The parameters are called
LimitPositionPositive and LimitPositionNegative, with values of UINT#1201 and UINT#1200 respectively.
Use the MC_WriteParameter function block for these and all controller side parameters. Position limit
parameters are in user units.
•
When a position limit is exceeded, a controller alarm will be generated, obtainable via the
MC_ReadAxisError function block, or the web server.
•
The controller alarm will be 16#3202 0001 if the positive position limit is exceeded and 16#3202 0002 if
the negative position limit is exceeded.
•
To disable the position limits, set LimitPositionEnable, parameter 1202 to zero.
•
LimitPositionPositive must be greater than LimitPositionNegative.
•
LimitPositionNegative must be lower than LimitPositionPositive.
•
See the
on Yaskawa's YouTube channel.
Error Description
ErrorID
Meaning