Programming 5 - 16, B5-01 pi mode, B5-02 proportional gain setting – Yaskawa P7 Drive User Manual User Manual
Page 100: B5-03 integral time setting
Programming 5 - 16
In some situations there are two feedback inputs. The drive can be programmed to maintain a set differential between two
analog signals. If input A2 is configured as a “PI Differential Mode” (H3-09= “16: PI Differential”), then the Drive will maintain a
set difference between the measurements read on inputs A1 and A2. This differential setpoint is programmed by parameter
(b5-07).
b5-01 PI Mode
The Drive can be used as a stand-alone PI controller. If PI functionality is selected by parameter b5-01, the Drive will adjust its
output to cause the feedback from a transmitter to match the PI setpoint (b5-19). The setting of b5-01 will determine whether PI
functionality is disabled (b5-01= “0: Disabled”), enabled (b5-01= “1: Enabled”), or enable with the output of the PI function used
to trim a Speed Command (b5-01= “3: Fref+PI”).
b5-02 Proportional Gain Setting
Setting Range:
0.00 to 25.00
Factory Default: 2.00
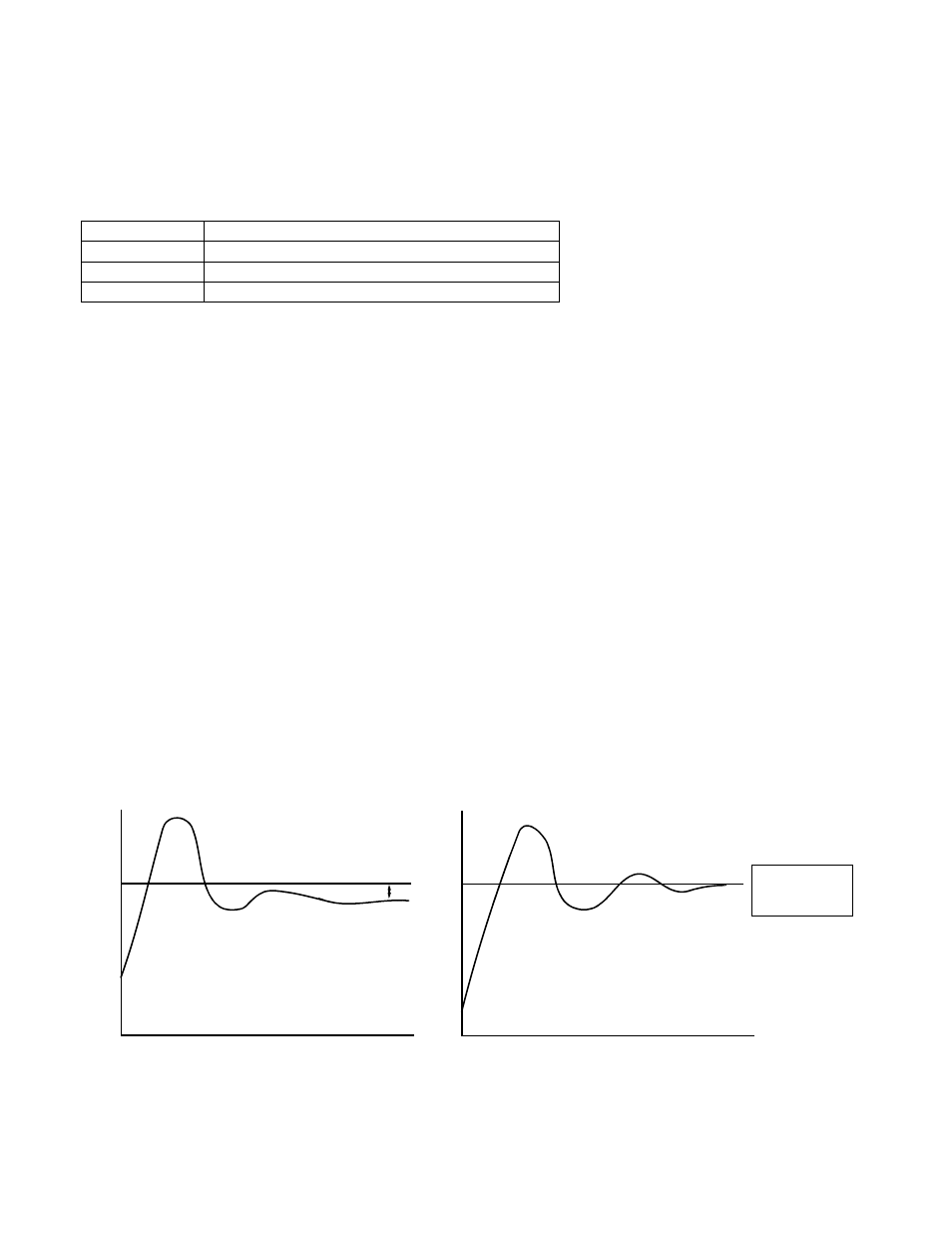
The proportional gain will apply a straight multiplier to the calculated difference (error) between the PI Setpoint and the
measured transmitter feedback at terminal A2. A large value will tend to reduce the error but may cause instability (oscillations)
if too high. A small value may allow to much offset between the setpoint and feedback (See Figure 16 below).
b5-03 Integral Time Setting
Setting Range:
0.0 to 360.0 Seconds
Factory Default: 5.0 Seconds
The Integral factor of PI functionality is a time-based gain that can be used to eliminate the error (difference between the setpoint
and feedback at steady state). The smaller the Integral Time set into b5-03, the more aggressive the Integral factor will be. To turn
off the Integral Time, set b5-03= 0.00.
Fig. 16 PID Feedback Response Characteristics
Setting
Description
0
Disabled (factory default)
1
Enabled
3
Fref+PI
Zero
offset with
Integral Action
No Integral
With Integral
Me
asu
re
d
F
eed
ba
ck
Me
asu
red
F
eed
ba
ck
Setpoint
Offset
Setpoint
Feedback
Feedback
TIME
TIME