2 mechatrolink-ii command list, 1 main commands (in command code order), 2 mechatrolink – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 13: 1 main commands (in command code order) -5, 2 mechatrolink-ii command list -5
1.2 MECHATROLINK-II Command List
1-5
1
MECHA
TROLINK-
II
Commands
1.2 MECHATROLINK-II Command List
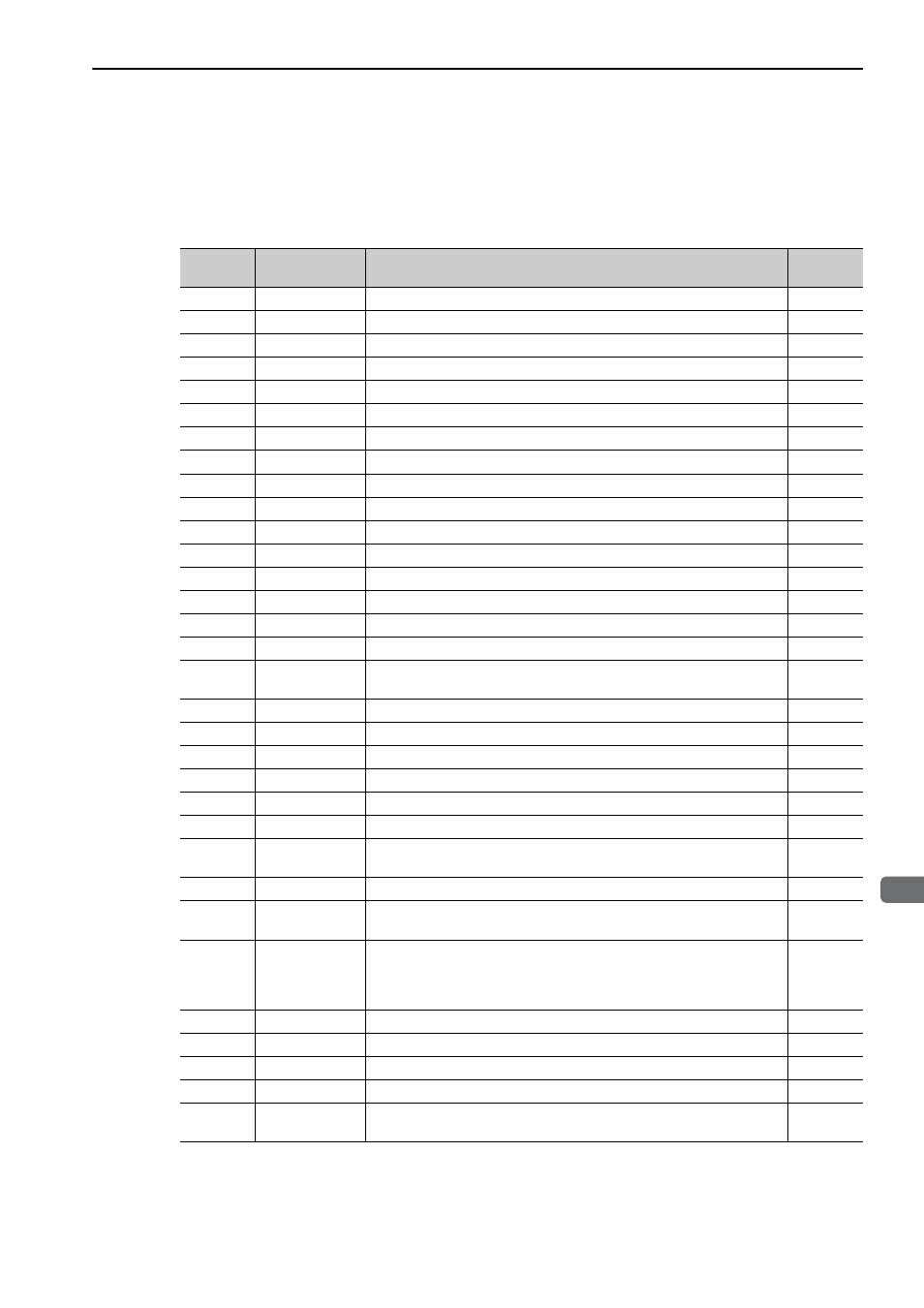
1.2.1 Main Commands (In command code order)
The MECHATROLINK-II main commands used for
Σ-V series servo drives are listed below.
Command
Code
Command
Function
Reference
00H
NOP
Nothing is performed.
01H
PRM_RD
Reads the specified parameter.
02H
PRM_WR
Saves the specified parameter.
03H
ID_RD
Reads the device ID.
04H
CONFIG
Enables the current parameter settings.
05H
ALM_RD
Reads the current alarm or warning status, and the alarm history.
06H
ALM_CLR
Clears the current alarm or warning status, and the alarm history.
0DH
SYNC_SET
Starts synchronous communications.
0EH
CONNECT
Requests to establish a MECHATROLINK connection.
0FH
DISCONNECT
Requests to releases connection.
1CH
PPRM_WR
Saves the parameters in non-volatile memory.
20H
POS_SET
Sets the coordinates.
21H
BRK_ON
Turns the brake signal off and applies the holding brake.
22H
BRK_OFF
Turns the brake signal on and release the holding brake.
23H
SENS_ON
Turns the encoder power supply on, and gets the position data.
24H
SENS_OFF
Turns the encoder power supply off.
25H
HOLD
From current motion status, performs a deceleration stop and positioning
according to the deceleration value set in the parameter.
28H
LTMOD_ON
Enables the position data latch by the external signal input.
29H
LTMOD_OFF
Disables the position data latch by the external signal input.
30H
SMON
Monitors the SERVOPACK status.
31H
SV_ON
Turns the servo of the motor on.
32H
SV_OFF
Turns the servo of the motor off.
34H
INTERPOLATE
Starts interpolation feeding.
35H
POSING
Starts positioning to the target position (TPOS) at the target speed
(TSPD).
36H
FEED
Starts constant speed feeding at the target speed (TSPD)
38H
LATCH
Performs interpolation feeding and latches the position using the specified
latch signal.
39H
EX_POSING
Moves toward the target position (TPOS) at the target speed (TSPD).
When a latch signal is input midway, positioning is performed according
to the final travel distance for external position specified in the parameter
from the latch signal input position.
3AH
ZRET
Performs a homing.
3CH
VELCTRL
Controls speed.
3DH
TRQCTRL
Controls torque (force).
3EH
ADJ
Used to monitor and adjust data for maintenance.
3FH
SVCTRL
Performs general-purpose servo control. This command is compatible
with MECHATROLINK version 1.0 and earlier.