2 motion commands details, 1 stop motion (hold: 25h), 2 motion commands details -3 – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 68: 1 stop motion (hold: 25h) -3, 1) hold command (25h)
4.2 Motion Commands Details
4-3
4
Motion Commands for Operation
4.2 Motion Commands Details
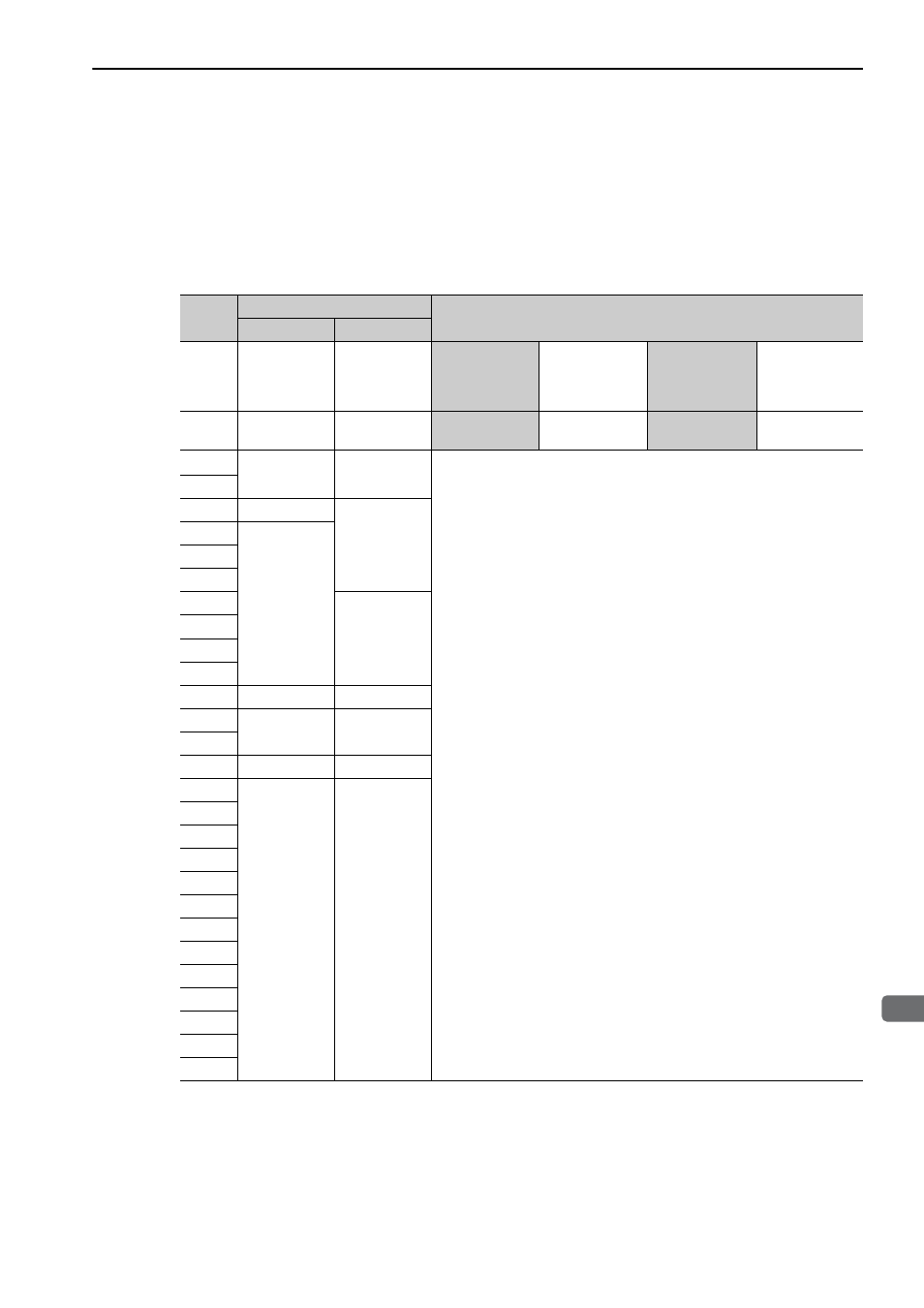
4.2.1 Stop Motion (HOLD: 25H)
(1) HOLD Command (25H)
The HOLD command is used to perform a deceleration to stop from the current run status, at a deceleration
ratio specified by the parameter for positioning.
Byte
HOLD
Description
Command
Response
1
25H
25H
Phases in
which the
command can
be executed
Phase 2 and 3
Synchronization
classification
Asynchronous
command
2
ALARM
Processing
time
Within commu-
nications cycle
Subcommand
Cannot be used
3
OPTION
STATUS
• From the current state, performs a stop specified by the HOLD_MOD
command.
• Use DEN (output complete) to confirm position data output completion.
• Option field can be used.
• This command will cancel the latch processing specified by the LATCH
or EX_POSING command.
• This command will cancel ZRET latch processing and ZRET homing.
• Upon completion of execution of this command, the reference position
(POS) must be read, and the controller coordinate system must be setup.
• The stopping method can be selected using HOLD_MOD.
0 = Stop according to the 1st or 2nd linear deceleration constant.
1 = Stop immediately (stop reference output)
2 = Stop according to the linear deceleration constant for stopping
4
5
HOLD_MOD
MONITOR1
6
7
8
9
MONITOR2
10
11
12
13
SEL_MON1/2 SEL_MON1/2
14
IO_MON
15
16
WDT
RWDT
17
Subcommand
area
Subcommand
area
18
19
20
21
22
23
24
25
26
27
28
29