5 setting the origin before starting operation, 1 when using an incremental encoder, 2 when using an absolute encoder – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 31: 5 setting the origin before starting operation -14
2 Operation Sequence
2.5.1 When Using an Incremental Encoder
2-14
2.5 Setting the Origin Before Starting Operation
2.5.1 When Using an Incremental Encoder
When an incremental encoder is used in the slave station, carry out a homing operation after turning ON the
power supply.
After the origin is set, set the reference coordinate system to determine the work coordinate origin as required:
1. Setting the Reference Coordinate System Using ZRET Command
The master station (controller) uses ZRET command to return the slave station to the origin and sets the ref-
erence coordinate system based on the origin.
2. Setting the Reference Coordinate System Using POS_SET Command
The master station (controller) uses POS_SET command to set the reference coordinate system of the slave
station.
i) Position to the reference position.
ii) Send the POS_SET command with POS_SET_MODE.POS_SEL = APOS (= 3),
POS_SET_MODE.REFE = 1, and POS_DATA = reference position.
ZPOINT and software limits are enabled after the reference coordinate system has been set.
2.5.2 When Using an Absolute Encoder
When an absolute encoder is used in the slave station, SENS_ON command can be used to set the reference
coordinate system of the slave station. The reference coordinate system will be set according to the position
detected by the absolute encoder and the coordinate system offset of the encoder (i.e., the offset between the
encoder’s coordinate system and the reference coordinate system (device built-in parameter).
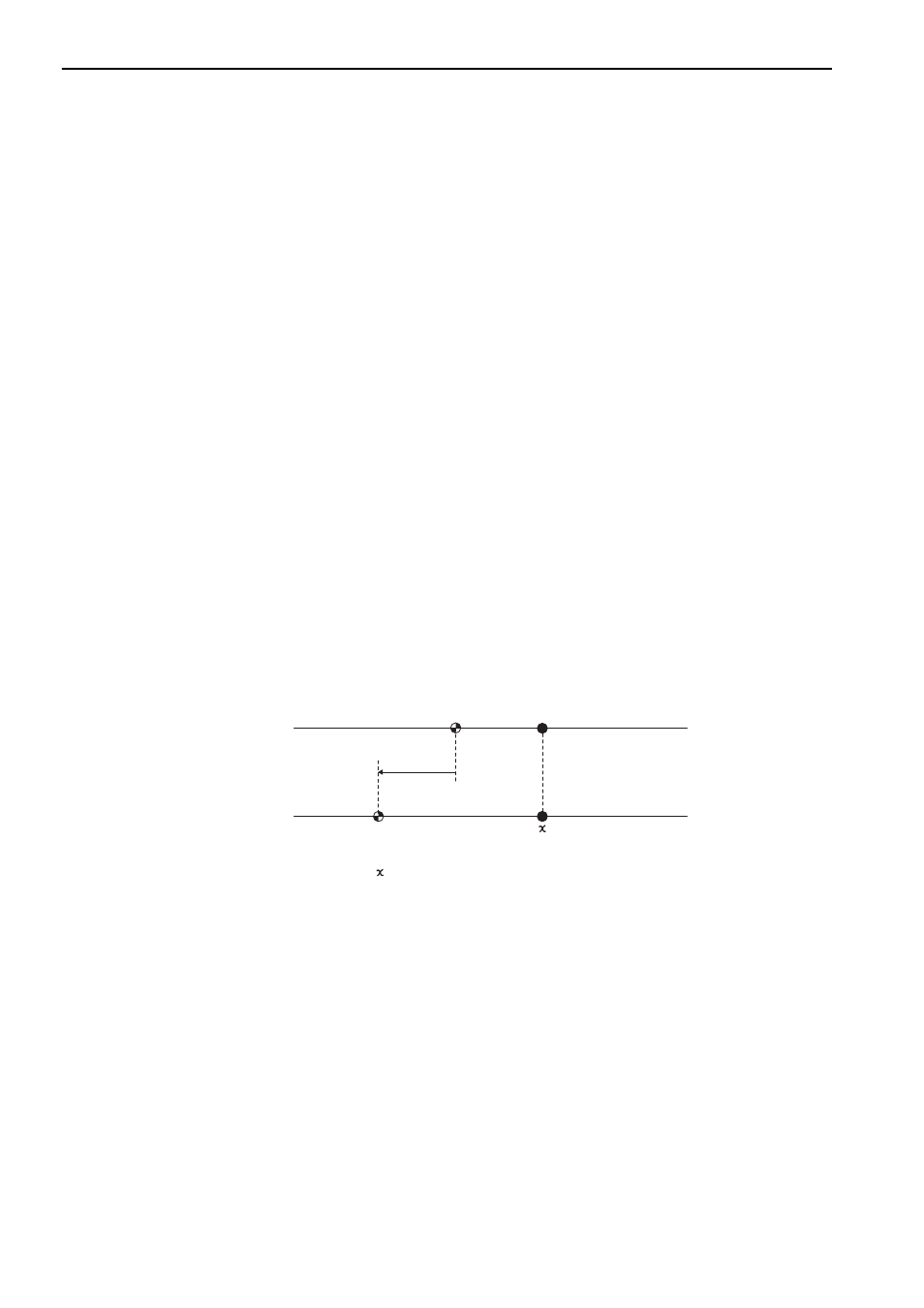
The relationship between the reference coordinate system (POS and APOS), the encoder’s coordinate system,
and the coordinate system offset of the encoder are shown in the following figure.
POS: Reference position
APOS: Feedback position
Reference
coordinate
system
(POS, APOS)
X= +Pn808
Pn808: Absolure Encoder Origin Offset
Current
position
X
Reference coordinate
system origin
Encoder origin
Encoder
coordinate
system
Pn808