3) release brake (brk_off: 22h) – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 138
A Brake Control Commands
A-3
App
Appendix
(3) Release Brake (BRK_OFF: 22H)
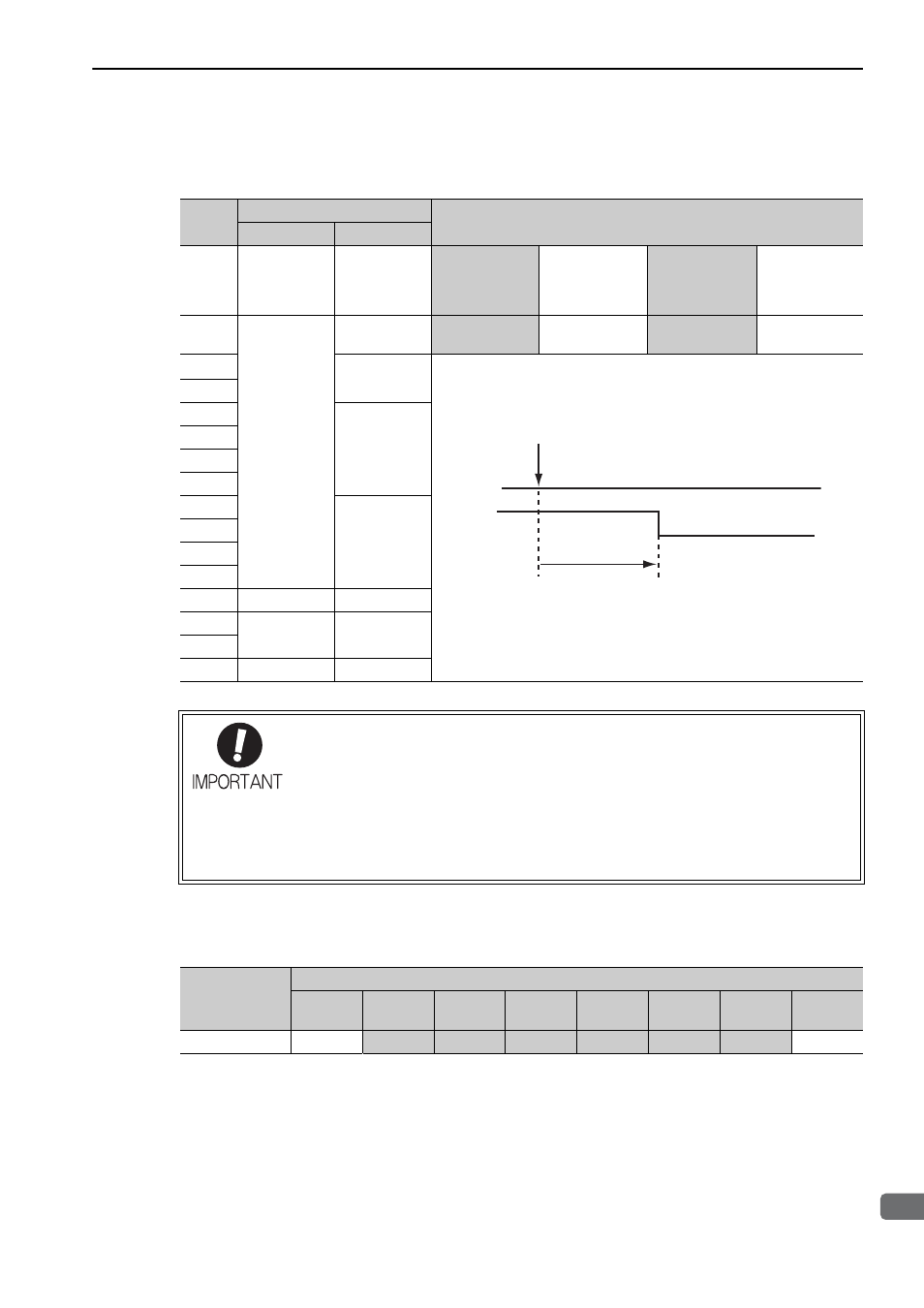
The specifications of BRK_OFF command (22H) are described below.
(4) Combination of BRK_OFF Command (22H) and Subcommands
The following table shows which subcommands can be combined with BRK-OFF command.
Note:
√: Can be combined, ×: Can not be combined
Byte
BRK_OFF
Description
Command
Response
1
22H
22H
Phases in
which the
command can
be executed
Phase 2 and 3
Synchronization
classification
Asynchronous
command
2
ALARM
Processing
time
Within commu-
nications cycle
Subcommand
Cannot be used
3
STATUS
• Turns the brake signal (/BK) ON and releases the brake.
• This command is enabled when Pn50F.2 is not set to 0
• Brake signal output timing
4
5
MONITOR1
6
7
8
9
MONITOR2
10
11
12
13
SEL_MON1/2 SEL_MON1/2
14
IO_MON
15
16
WDT
RWDT
BRK_ON and BRK_OFF commands are always valid as command as long as no warning
occurs.
Therefore, sending BRK_OFF command while the servomotor is being powered (Servo
ON) will not change the operation status.
However, it is very dangerous to send SV_OFF command in the above status since the
brake is kept released.
Always make sure of the status of brake control command when using BRK_ON or
BRK_OFF command.
Within 2 ms
BRK_OFF received
/BK
Main Command
Subcommand
NOP
PRM_RD PRM_WR
ALM_
RD
PPRM_
WR
LTMOD_
ON
LTMOD_
OFF
SMON
BRK_OFF
√
×
×
×
×
×
×
√