Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 97
5 Command Related Parameters
5.2.2 Motion Acceleration/Deceleration Function Setting
5-8
Position Reference Filter Type Selection
Use the ACCFIL bit of the OPTION field to specify the position reference filter type.
Information: While a position reference is being output (STATUS.DEN = 0), the parameter or the filter type
cannot be changed. Wait for completion of the position reference output (STATUS.DEN = 1) to
change the setting.
(3) Linear Deceleration Speed Setting for Commands to Stop a Motor
Set the deceleration speed when using either of the following commands to stop a motor.
• HOLD (When HOLD_MOD = 2)
• SV_OFF (When Pn829
≠ 0)
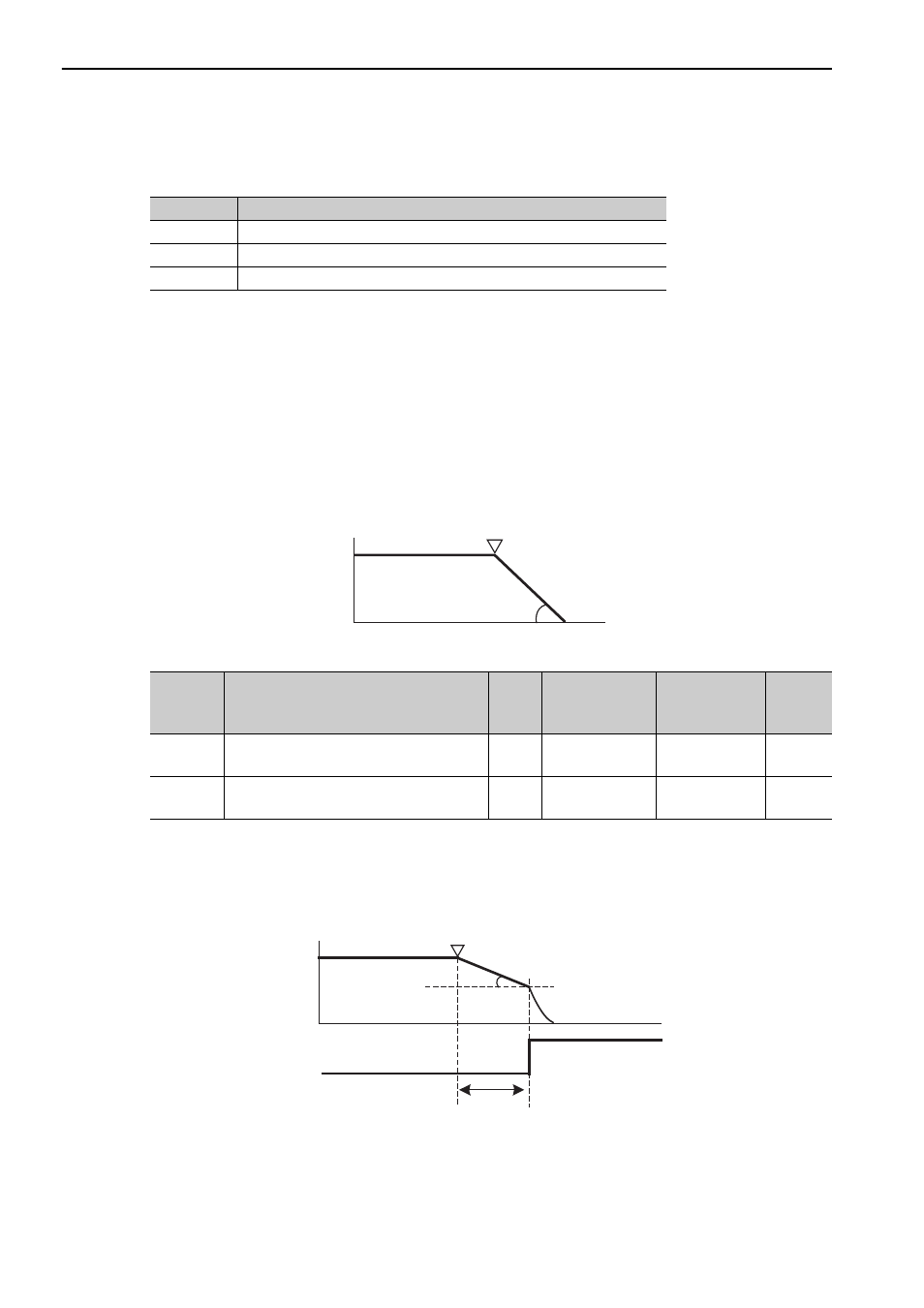
Setting for Deceleration to a Stop by Executing HOLD Command (HOLD_MOD = 2)
Setting for Deceleration to a Stop by Executing SV_OFF Command
When SV_OFF command is executed while a motor is running, the servo can be turned OFF after deceleration
to a stop.
When Pn829 is set to 0 (factory setting), the servo will turn OFF immediately upon reception of the SV_OFF
command.
ACCFIL
Meaning
0
Without position reference filter
1
Exponential function acceleration/deceleration position reference filter
2
Movement average time position reference filter
HOLD command
(HOLD_MOD=2)
Motor speed
The parameter number in parentheses is when Pn833 = 1.
Pn827 (Pn840)
Parameter
No.
Name
Data
Size
(byte)
Setting Range
Unit
Factory
Setting
Pn827
Linear Deceleration Constant 1 for Stopping
2
0 to 65535
10000
reference units/s
2
100
Pn840
Linear Deceleration Constant 2 for Stopping
4
0 to 20971520
10000
reference units/s
2
100
Servo ON status
The parameter number in parentheses is when Pn833 = 1.
SV_OFF command
Servo ON
Pn829
Motor speed
Pn827 (Pn840)
The motor stops
according to Pn001.0
Servo OFF