3) how to send an adj command for monitoring data – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 64
3.2 Commands Details
3-33
3
Commands for Preparation Process
(3) How to Send an ADJ Command for Monitoring Data
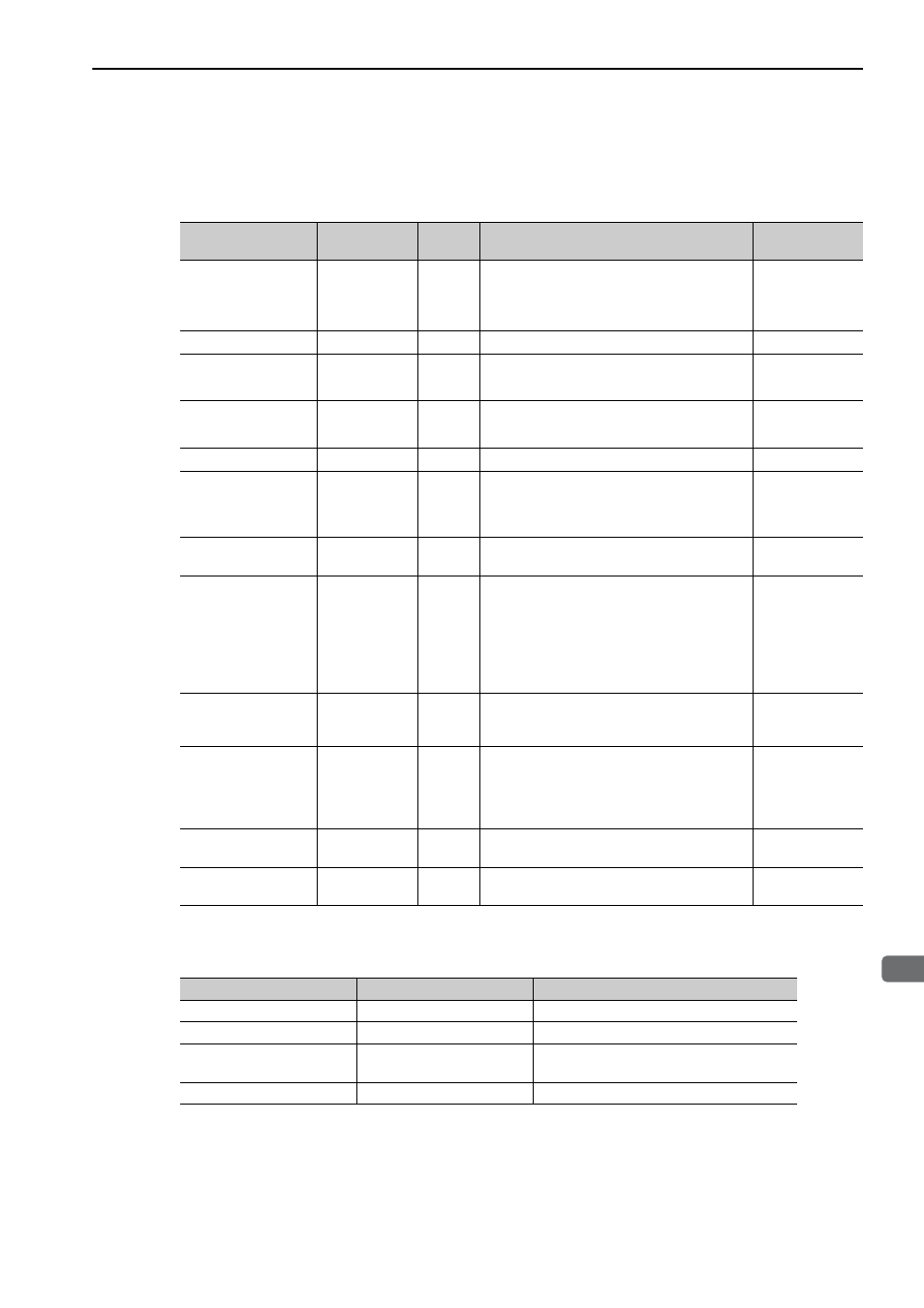
The table below lists the data that can be monitored.
ADJ Command Execution Procedure for Monitoring Data:
1. Set the reference address to be monitored, and send the ADJ command.
CCMD
= 0003H
CADDRESS = Reference address
When the slave station receives the command normally, CMDRDY of status field will be see to 1. Also
check ERRCODE.
2. When the command transmission is completed normally, CDATA of RSP will be read out for CSIZE to
obtain the data.
List of Data that Can be Monitored
Name
Reference
Address
Data
Size
Unit
Remarks
Motor capacity
C00FH (Lower-
most)
C010H (Upper-
most)
2 bytes
[W]
Motor voltage
C011H
2 bytes
[V]
Motor rated speed
C01CH
2 bytes
Rotary motor: [
×10
C01EH reference value
min
-1
]
Linear motor: [
×10
C01EH reference value
mm / s]
Motor max. speed
C01DH
2 bytes
Rotary motor: [
×10
C01EH reference value
min
-1
]
Linear motor: [
×10
C01EH reference value
mm / s]
Motor speed exponent C01EH
2 bytes
−
Motor rated torque
(force)
C01FH
2 bytes
Rotary servomotor: [
×10
C021H reference value
N.m]
Linear servomotor: [
×10
C021H reference value
N]
Motor torque (force)
exponent
C021H
2 bytes
−
Encoder resolution
C022H (Lower-
most)
C023H (Upper-
most)
2 bytes
Rotary servomotor: [pulse / rev]
Linear servomotor: [pulse / pitch]
Note:
When fully-
closed setting is
enabled
(Pn002.3
≠0), the
unit is [pulse /
pitch]
Maximum motor
torque (force) that can
be output
E701H
2 bytes
[%]
Motor max. output
speed
C027H
2 bytes
Rotary servomotor: [
×10
C01EH reference value
min
-1
]
Linear servomotor: [
×10
C01EH reference value
mm / s]
Linear scale pitch
E084H
4 bytes
[
×10
E 086H reference value
pm / pitch]
For linear servo-
motors only
Linear scale pitch
exponent
E086H
2 bytes
−
For linear servo-
motors only
Details of Command to Monitor Data
Command
Response
CCMD/CANS
CCMD = 03H
CANS = 03H (copy of the command)
CADDRESS
Reference address
Reference address (copy of the command)
CSIZE/
ERRCODE
– (Not required)
At normal reception: SIZE (2 or 4)
At error occurrent: A value other than 2 and 4
CDATA/RDATA
– (Not required)
Reference data