4 specific operation sequences, 1 operation sequence when turning the servo on, 4 specific operation sequences -11 – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 28
2.4 Specific Operation Sequences
2-11
2
Operation Sequence
2.4 Specific Operation Sequences
This section describes operations that use commands in specific sequences.
2.4.1 Operation Sequence When Turning the Servo ON
Motor control using a host controller is performed using motion commands only during Servo ON (motor
power ON).
While the SERVOPACK is in Servo OFF status (while current to the motor is interrupted), the SERVOPACK
manages position data so that the reference coordinate system (POS, MPOS) and the feedback coordinate sys-
tem (APOS) are equal. For correct execution of motion commands, therefore, it is necessary to use the SMON
(Status Monitoring) command after the SERVOPACK status changes to Servo ON, to read the servo reference
coordinates (POS) and send an appropriate reference position.
Confirm the following bit status before sending the SV_ON command:
STATUS field: PON = 1 and ALM = 0
IO Monitor field: HBB = 0
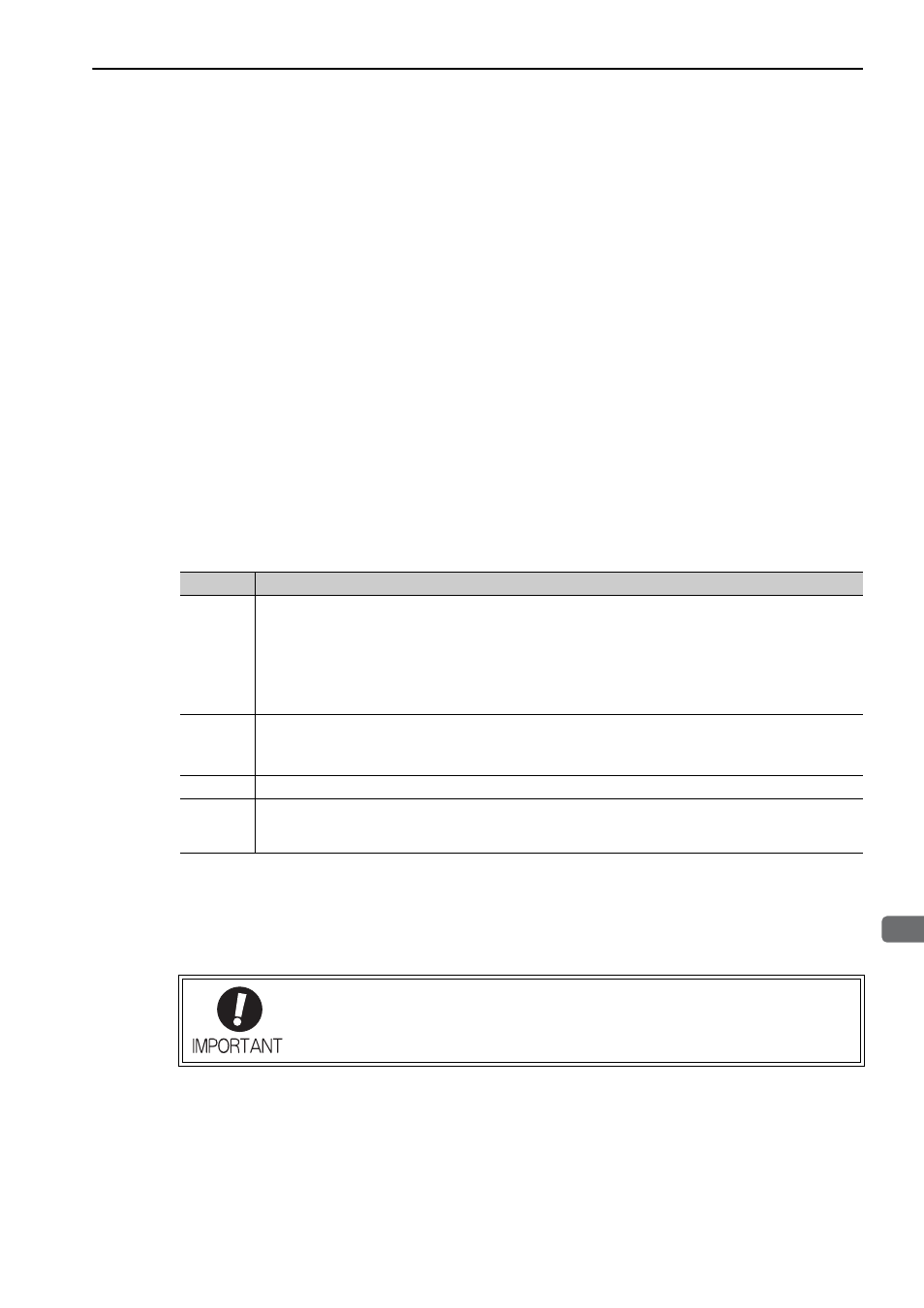
2.4.2 Operation Sequence When OT (Overtravel Limit Switch) Signal Is Input
When an OT signal is input, the SERVOPACK prohibits the motor from rotating in the way specified in the
parameter Pn001. The motor continues to be controlled by the SERVOPACK while its rotation is prohibited.
When an OT signal is input, use the following procedure to process the OT signal.
Note 1. When an OT signal is input during execution of motion command ZRET or EX_POSING, the execution of the
command will be cancelled. For retraction, always send a stop command described in procedure 1 first, and then
send a retraction command (move command).
2. In case of OT ON (P-OT or N-OT of IO_MON field = 1) or Software-Limit ON (P_SOT or N_SOT of STATUS
field = 1), the motor may not reach the target position that the host controller specified. Make sure that the axis
has stopped at a safe position by confirming the feedback position (APOS).
2.4.3 Operation Sequence at Emergency Stop (Main Circuit OFF)
After confirming that SV_ON or PON bit in the response data STATUS field is OFF (= 0), send an SV_OFF
command.
During emergency stop, always monitor the SERVOPACK status using a command such as the SMON (Status
Monitoring) command.
Procedure
Operation
1
Monitor OT signals (P_OT and N_OT of IO Monitor field). When an OT signal is input, send an appropri-
ate stop command:
While an interpolation command (INTERPOLATE, LATCH) is being executed: Leave the interpolation
command as it is and stop updating the interpolation position. Or, send a HOLD command and SMON
command.
While a move command (such as POSING) other than interpolation commands is being executed: Send a
HOLD command.
2
Check the output completion flag DEN. If DEN = 1, the SERVOPACK completed the OT processing.
At the same time, check the flag PSET. If PSET = 1, the motor is completely stopped.
Keep the command used in procedure 1 active until both of the above flags are set to 1.
3
Read out the current reference position (POS) and use it as the start position for retraction processing.
4
Use a move command such as POSING or INTERPOLATE for retraction processing. Continue to use this
command until the retraction is finished. If the move command ends without finishing the retraction, restart
the move command continuously from the last target position.
The host controller may not be able to monitor a brief change in the P-OT or N-OT signal
to P-OT=1 or N-OT=1. Proper selection, installation and wiring in the limit switch is
required to avoid chattering and malfunctions in the OT signal.