Start stop_ex, Start, Stop_ex – Yaskawa FSP Amplifier FlexWorks User Manual
Page 180
Command Reference
180
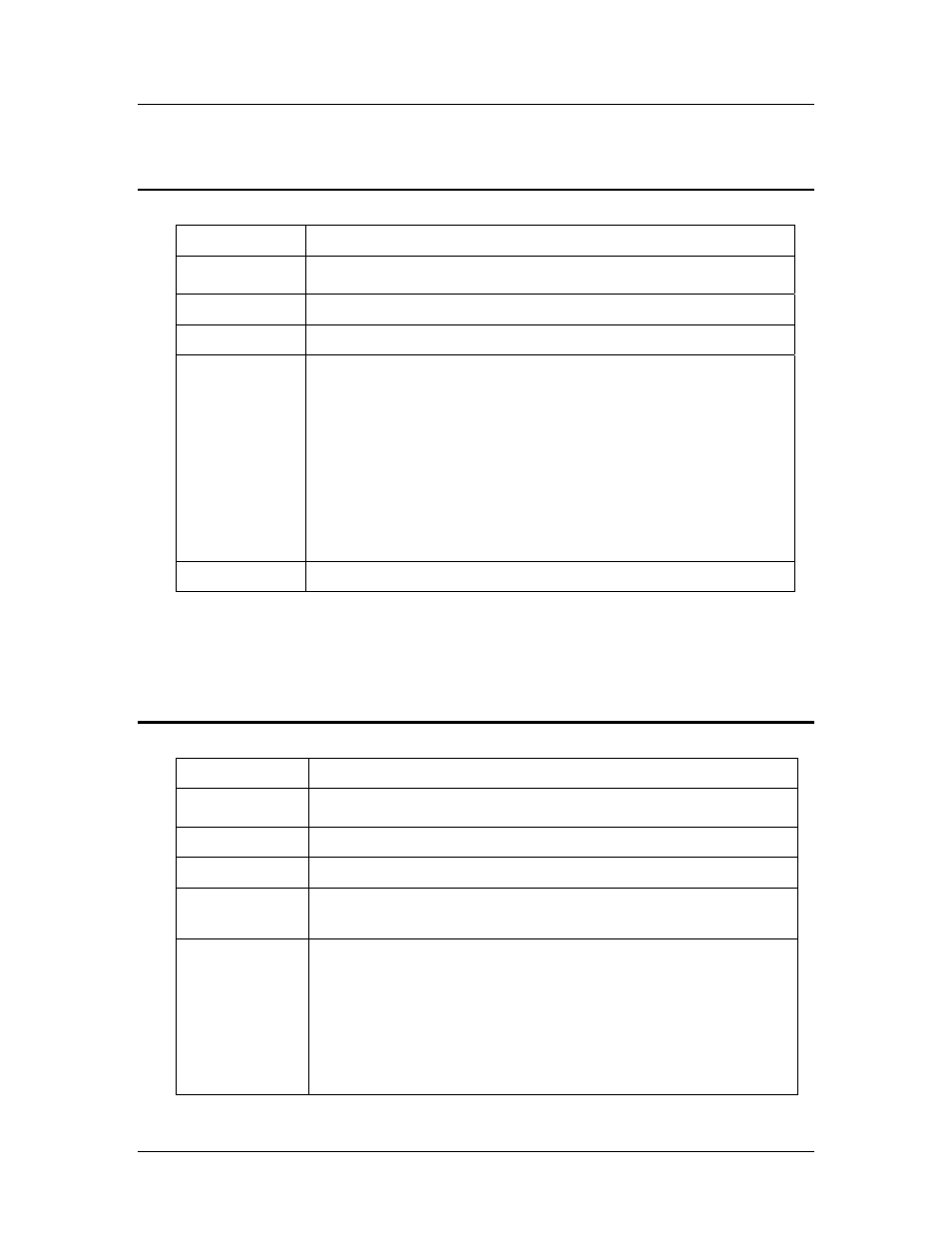
START
G
ROUP
Motion
S
YNTAX
START
O
P
. C
ODE
82
M
ODES
Immediate
D
ESCRIPTION
Triggers the execution of a previously defined motion
that is held by a WAIT_FOR_START command.
The START command reaches all the drives (provided
that several drives are connected via serial
communication) at the same time as a broadcast
message.
The START command clears the WAIT_FOR_START
flag. Therefore the WAIT_FOR_START command must
be set per motion.
S
EE
A
LSO
WAIT_FOR_START
STOP_EX
G
ROUP
Motion
S
YNTAX
STOP_EX <Type> <Servo>
O
P
. C
ODE
153
M
ODES
Program, Immediate, Sequential
M
OTION
M
ODE
Position (1)
D
ESCRIPTION
This command is used to stop motor motion. The rate
of deceleration is dependent on the
<Type>
chosen.
The
<Servo>
argument specifies whether or not the
servo must remain enabled after stopping (but cannot
be used to enable a previously disabled servo). The
program can also be terminated after the motor has
stopped.