Yaskawa FSP Amplifier FlexWorks User Manual
Page 250
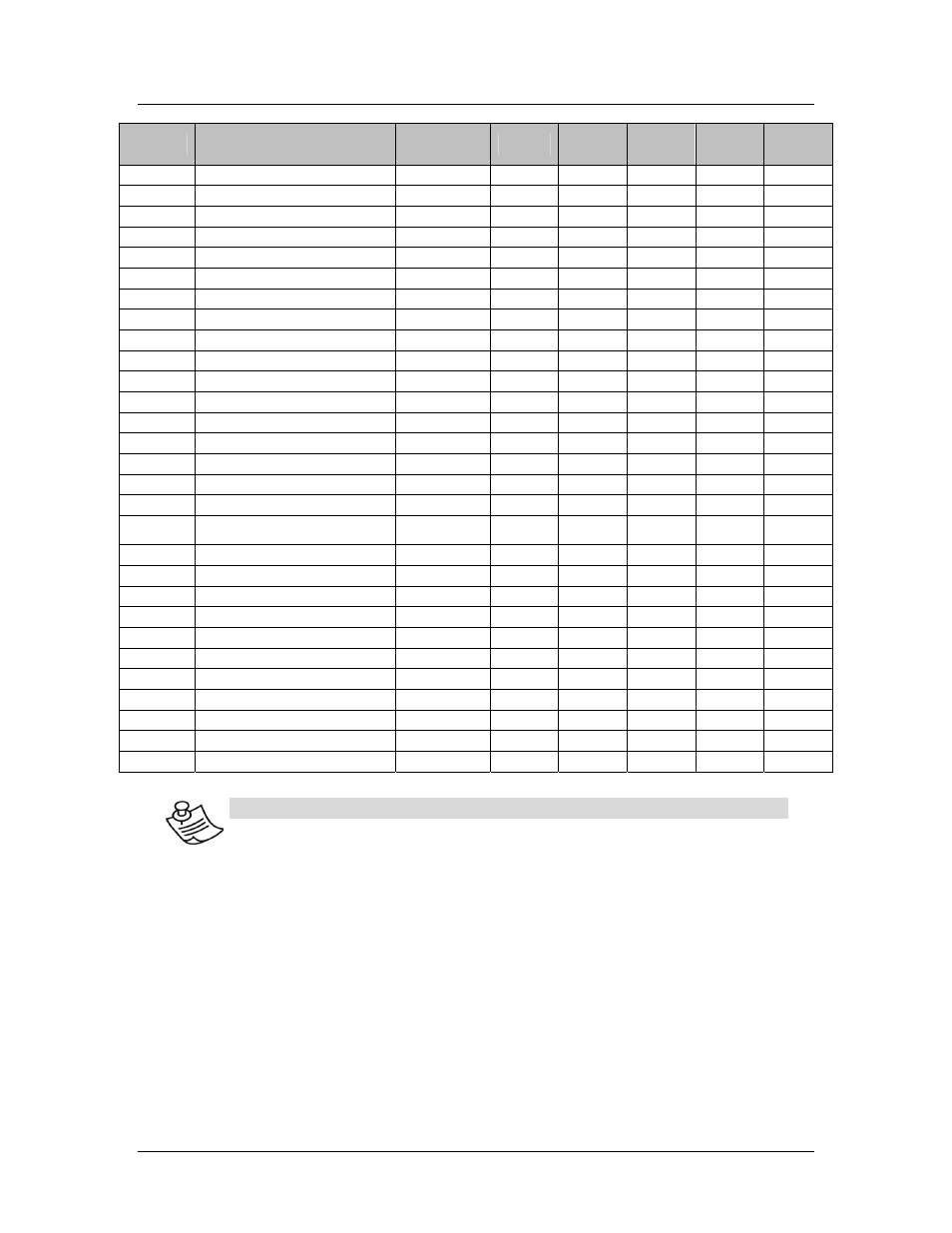
List of Operation Codes
250
Op-Code Name
Mode of
Operation
(1)
Arg 1
(2)
Arg 2
(2)
Arg 3
(2)
Arg 4
(2)
Arg 5
(2)
119
MOVE_R
3;4 4
V
- - - -
0 POLLING
- - - - -
159
READ_FROM_ARRAY
2;3;4
2 U V
1 U
(5)
151
REGISTRATION_DISTANCE
3;4 4
V
- - - -
77 RETURN
4
- - - - -
78 RUN
2;3 1
U
- - - -
96
SAVE_PRG_ECAM 2
- -
79
SET_OUTPUT
2;3;4
2 U V
1 U
107
SET_OUTPUTS
2;3;4
4 U V
4 U V
-
-
-
80
SET_PAR
2;3
2 U
2 U
-
-
-
81 SET_VAR
2;3;4 1
U
(6)
4
V
- - -
95 SET_ZERO_POSITION
2;3;4 1
U
(4)
- - - -
115
SLIDE
3;4 4
V
- - - -
102
SLIDE_ANALOG
3;4 - - - - -
83 SPEED
2;3;4 4
U
- - - -
100 SPEED_CONTROL
3;4
1
U
(4)
- - - -
82 START
2
- - - - -
84 STOP
7
2;3;4 1
U
- - - -
153
STOP_EX
2; 3;4
1 U
(4)
1
U
(4)
-
-
99 STOP_MOTION
7
2;3;4 - - - - -
116
TORQUE
3;4 2
V
- - - -
103
TORQUE_ANALOG 3;4 - - - - -
87 TORQUE_LIMITS
2;3;4 2 2 - - -
145
WAIT_EXACT
3;4 4
V
- - - -
146
WAIT_FOR_START 3;4 - - - - -
109
WAIT_INPUT
3;4
1 U
1 U
(3D)
1 U
4 V
-
148
WAIT_STOP
3;4 4
V
- - - -
110 WAIT_VAR
3;4
1
U
(5)
1
U
(3B)
4
V
-
-
158
WRITE_TO_ARRAY
2;3;4
2 U V
4 V
N
OTES
:
(1) Mode of operation: 2 Immediate; 3 Sequential; 4 Program;
(2) Argument size. Number of data bytes of each argument. In
serial communication, each data byte consists of two
hexadecimal digits.
Example: to issue a TORQUE command, to specify a torque
value of 1000%: The table shows that the number of data
bytes is 2. 1000 in hexadecimal form is 0x03E8. The string that
should therefore be sent consists of the ASCII values 30, 33,
45, and 38.
U - Unsigned integer.
V – Argument value can be specified by numerical value or by a
variable.