Programming 5 - 21 – Yaskawa E7L Drive Bypass User Manual
Page 113
Programming 5 - 21
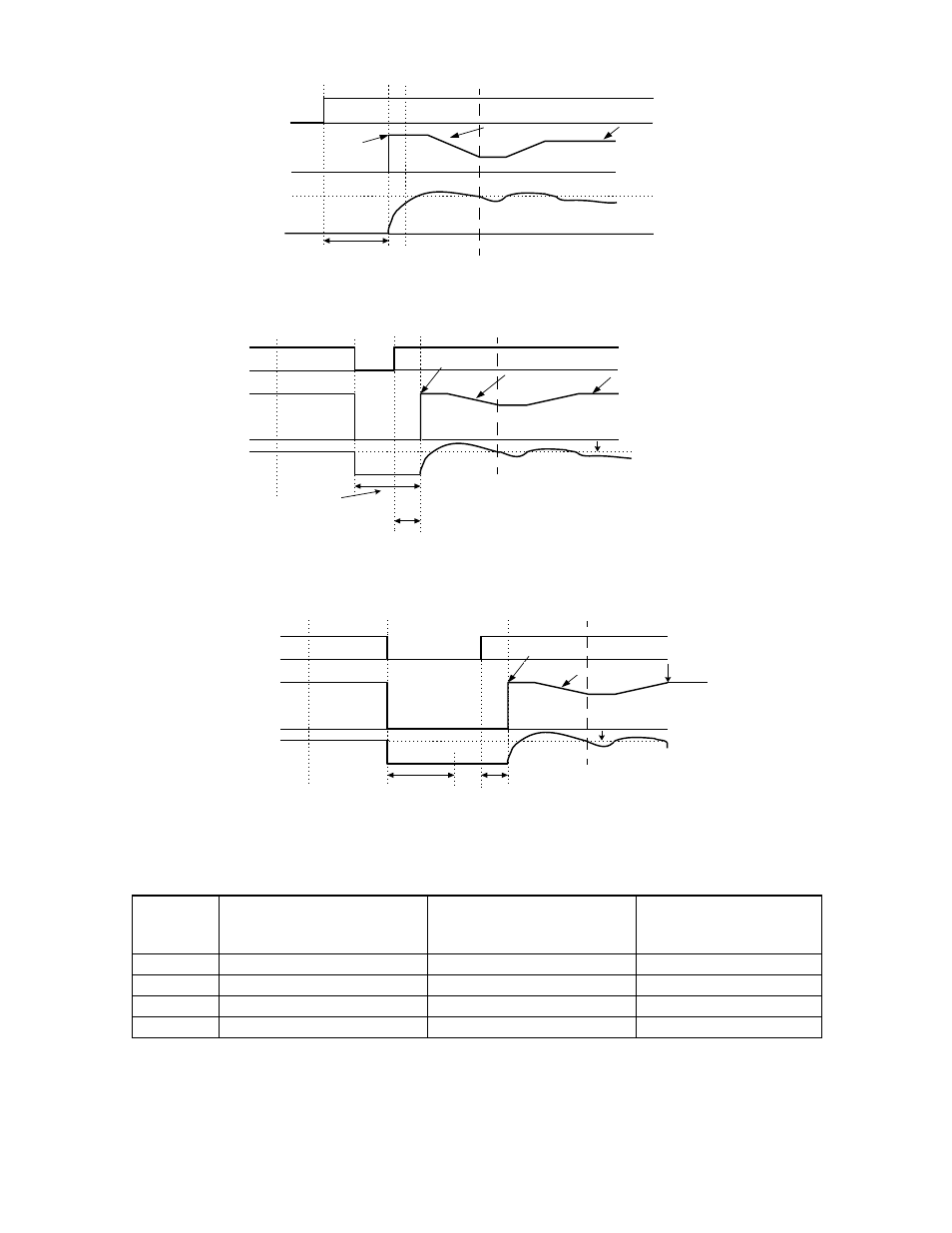
Fig 5.10 Speed Search (Current Detection Method) at Startup
Fig 5.11 Speed Search (Current Detection Method) after momentary power loss where the power loss
time is less than the minimum baseblock time
Fig 5.12 Speed Search (Current Detection Method) after momentary power loss where the power loss
time exceeds the minimum baseblock time
Setting of
b3-01
Automatic Speed Search for
all RUN commands
Automatic Speed Search after
momentary power loss and
baseblock
Speed Search Used for
Run with programmed
multi-function input
0
No
Yes - Speed Estimation
Yes - Speed Estimation
1
Yes - Speed Estimation
Yes - Speed Estimation
Yes - Speed Estimation
2
No
Yes - Current Detection
Yes - Current Detection
3
Yes - Current Detection
Yes - Current Detection
Yes - Current Detection
Run command
Output frequency
Output current
OFF
ON
b3-02
Deceleration time set in b3-03
Set frequency
reference
Minimum baseblock time
(L2-03)
Maximum output
frequency or
set frequency
* Lower limit is set using Speed Search Time (b3-05).
*
Search Delay Time (b3-05).
Speed search current level
AC power supply
Output frequency
Output current
OFF
ON
Output frequency before power loss
Set frequency
reference
Minimum baseblock time (L2-03)
*1 Baseblock time may be reduced by the output frequency
immediately before baseblock.
*2 After AC power supply recovery, motor waits for the minimum
Speed Search Wait Time (b2-03).
Deceleration
time set in b3-03
b3-02
speed search operating current
*2
*1
b3-05
AC power supply
Output frequency
Output current
OFF
ON
Output frequency before power loss
Set frequency
reference
Minimum baseblock time
(L2-03)
Deceleration speed set in b3-03
b3-02
Speed search operating time
Speed search wait time (b3-05)
Deceleration time set in b3-03